西门子 PLC 使用 Telegram 1 通过驱动器控制电机速度
介绍
SINAMICS S200 PN 是西门子伺服驱动系统之一,提供基本的速度控制功能作为其核心功能的一部分。
本教程介绍了使用 GSDML 文件与西门子 SIMATIC 控制器之一(S7-1500 PLC)配置速度控制的关键步骤。准备好深入研究两种场景的细节:基本控制和功能块控制,并附有详细说明。
图1.1 - 西门子SINAMICS S200伺服驱动系统| 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 - 自动化任务概述
在速度模式下使用 SINAMICS S200 PN 时,您可以依赖其对“标准报文 1”的无缝支持,这将在本教程中讨论。“标准电报 1”专门设计用于 RT(实时)模式。
先决条件
您需要遵循本教程:
- 您需要在个人计算机上安装TIA Portal软件。尽管本教程涉及版本 18,但请放心,其他版本的 TIA Portal 也可以正常工作。
- 您需要熟悉伺服电机调试。
硬件接线
在该设置中,伺服驱动系统使用单相AC230V电源运行,而SIMATIC系统依赖于DC24V电源。请记住检查电源电压的重要性。不要低估接线错误的后果——它可能会损坏驱动器或控制器。观察图 2.1 以了解该应用中的硬件配置方式。
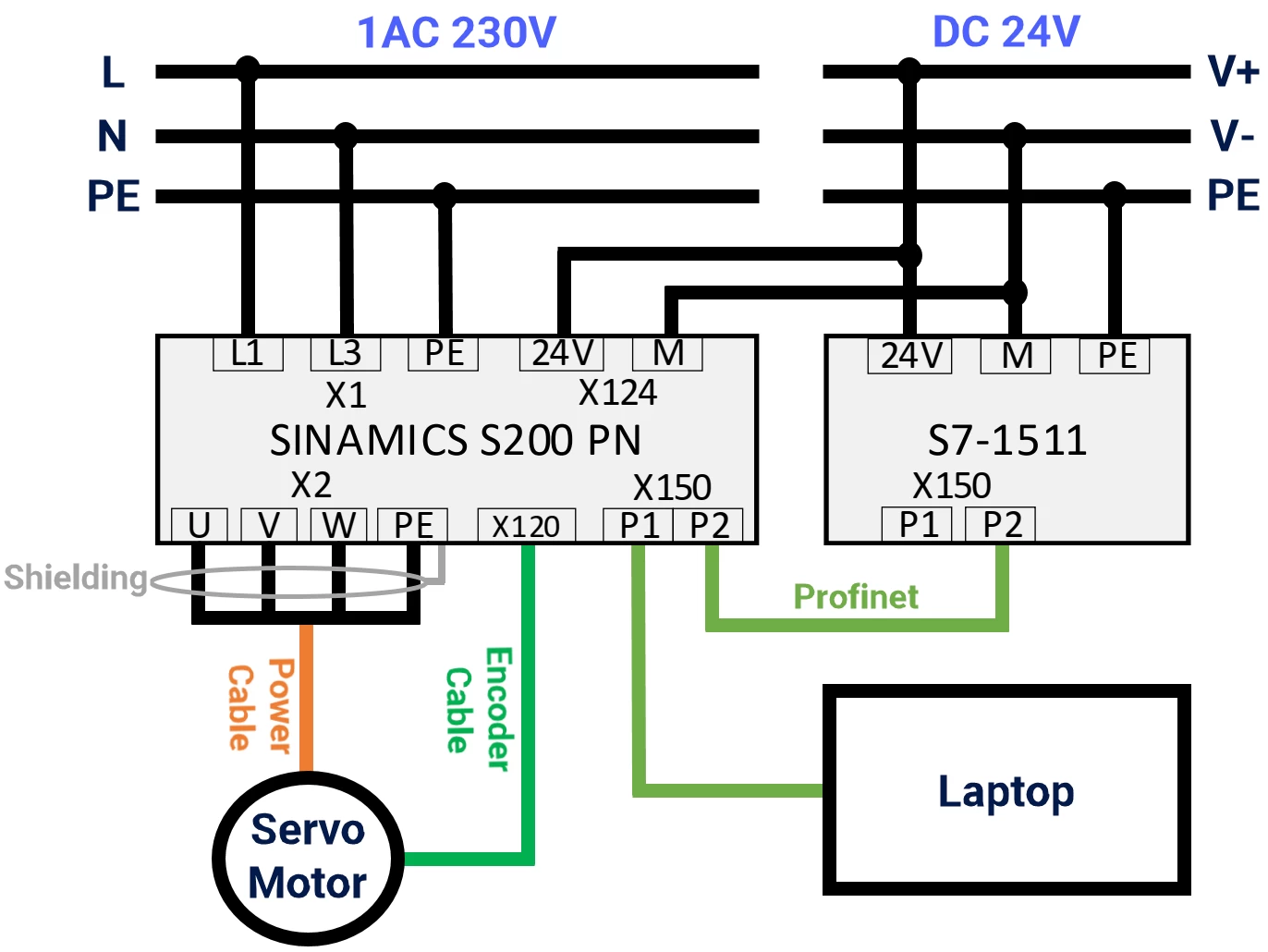
图2.1 - 西门子SINAMICS S200伺服驱动系统| 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -硬件接线
安装 GSDML 文件
让我们探讨一下将 GSDML 文件安装到西门子 TIA Portal 软件中所涉及的步骤。下载 SINAMICS S200 PN 的 GSDML 文件。提取 zip 文件的内容。
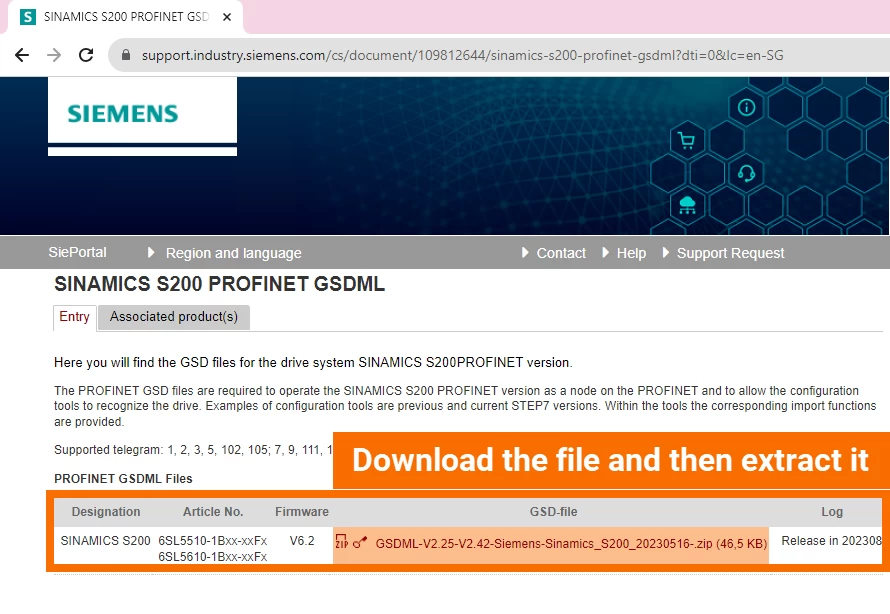
图 3.1 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -下载 GSDML 文件
启动 TIA Portal 软件,切换到项目视图,单击选项菜单,然后选择管理通用站描述文件 (GSD) 选项。单击相应的按钮选择源路径文件夹。选择安装过程所需的 GSDML 文件。单击“安装”按钮启动 GSDML 文件的安装。您将看到 TIA Portal 中显示的安装状态。安装完成后,按关闭按钮关闭弹出屏幕。最后,软件开始更新硬件目录。
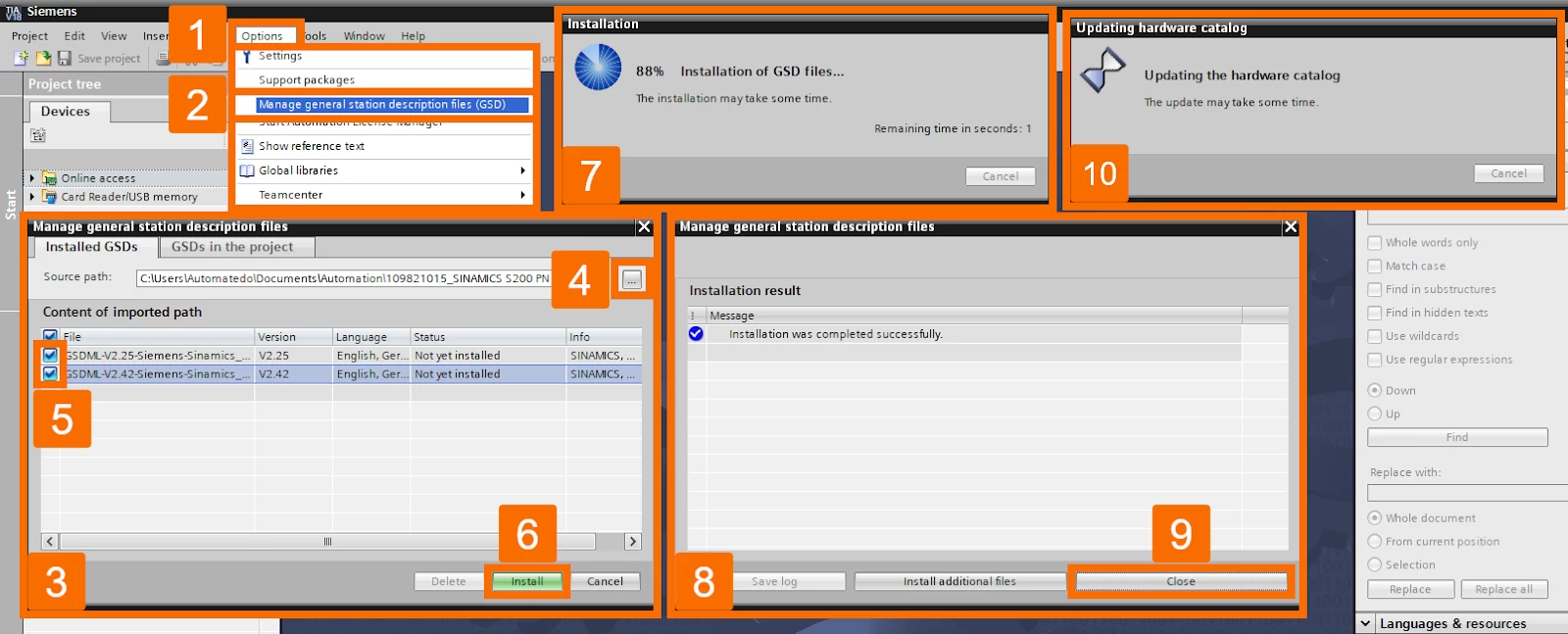
图 3.2 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -在 TIA Portal 中安装 GSDML 文件
硬件配置
现在是时候了解如何设置相应的 TIA Portal 项目并使用标准报文 1 配置 S200 PN 驱动器了。在 TIA Portal 软件仍然启动并运行的情况下,让我们开始创建一个新的 TIA Portal 项目并根据其设置项目名称和路径根据您的喜好。
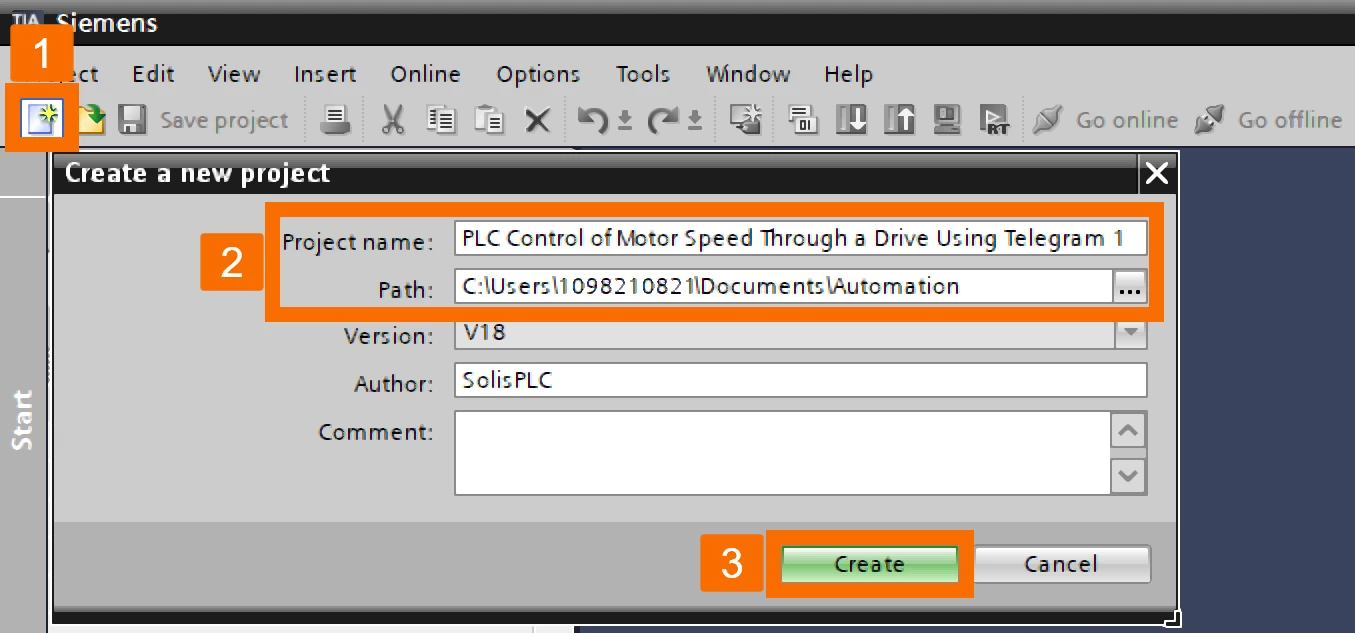
图 4.1 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -创建 PLC 控制项目
接下来,双击“添加新设备”以将 CPU 添加到项目中。选择控制器类别。在控制器列表中,找到您要使用的 CPU 1511T-1 PN。获得后,快速查看以确认 CPU 的固件版本。您可以根据自己的喜好随意修改CPU的设备名称。点击“确定”按钮,正式将 CPU 包含在项目中。
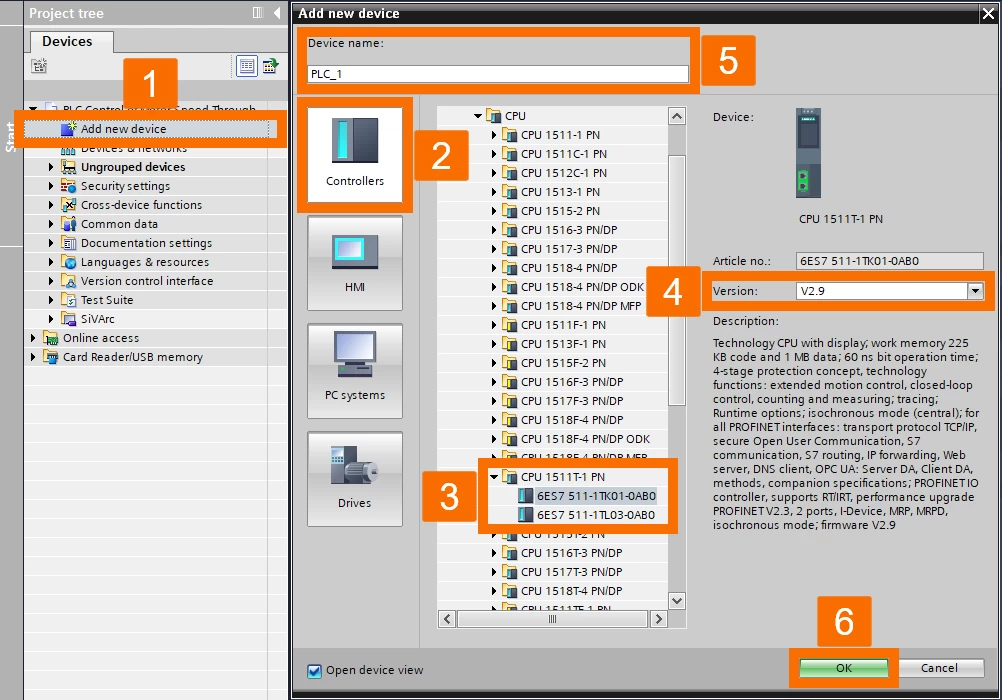
图 4.2 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -将所需的 PLC 添加到项目中
设备配置窗口打开后,翻转到网络视图选项卡。打开硬件目录。您必须浏览文件夹并在其他现场设备 -> PROFINET IO -> 驱动器 -> SIEMENS AG 下找到 SINAMICS。
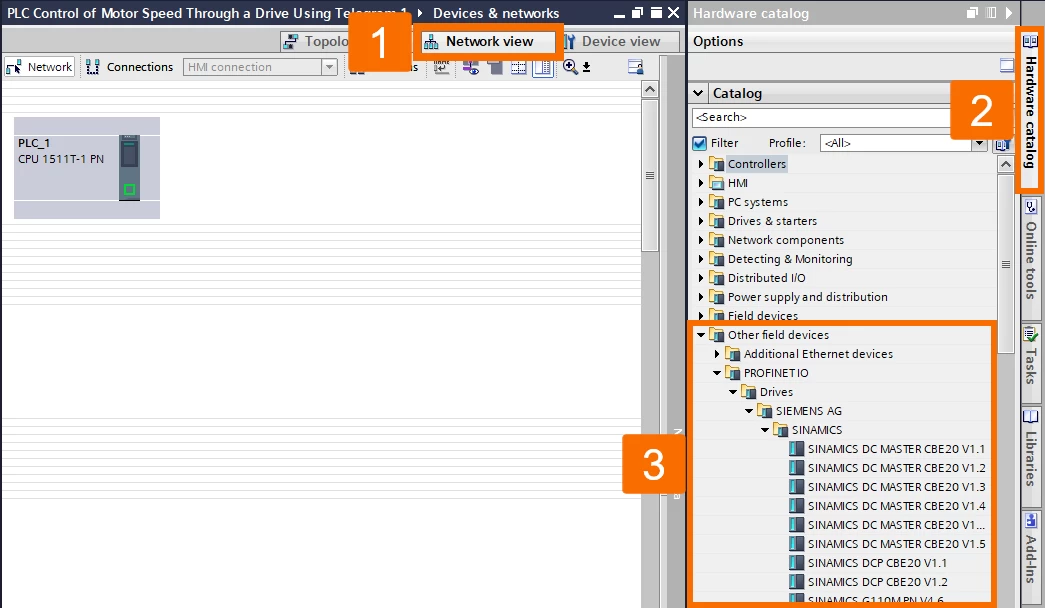
图 4.3 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -定位所需的伺服驱动器
找到标有 SINAMICS S200 PN V6.2 的 GSD 文件,然后双击该文件以将该伺服驱动器包含在项目中。单击 S200 PN 驱动器中标有“未分配”的链接。选择“PLC_1.PROFINET 接口_1”作为您想要的 IO 控制器。
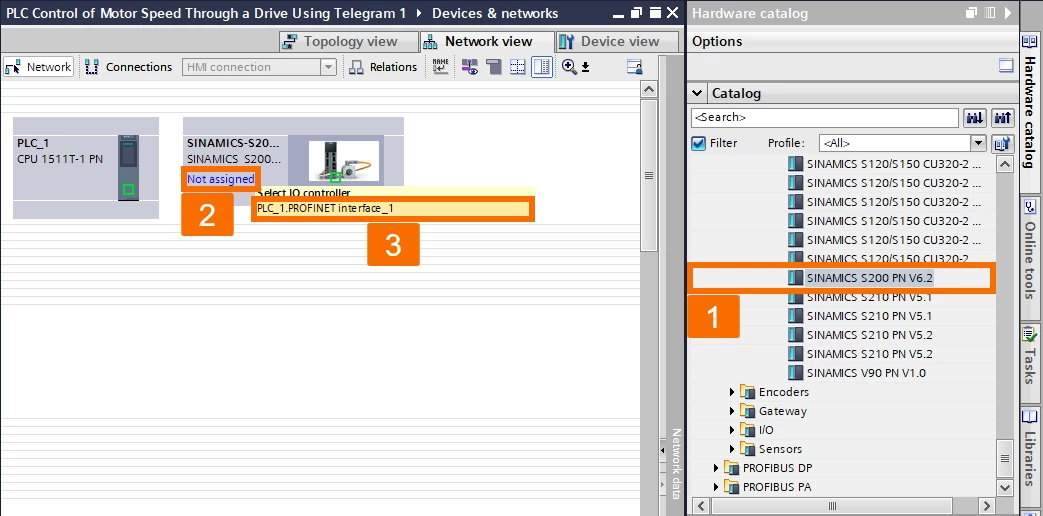
图 4.4 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -将所需的伺服驱动器添加到项目中
将 IO 控制器连接到驱动器后,您将看到显示的 Profinet 通信网络,如图 4.5 所示。
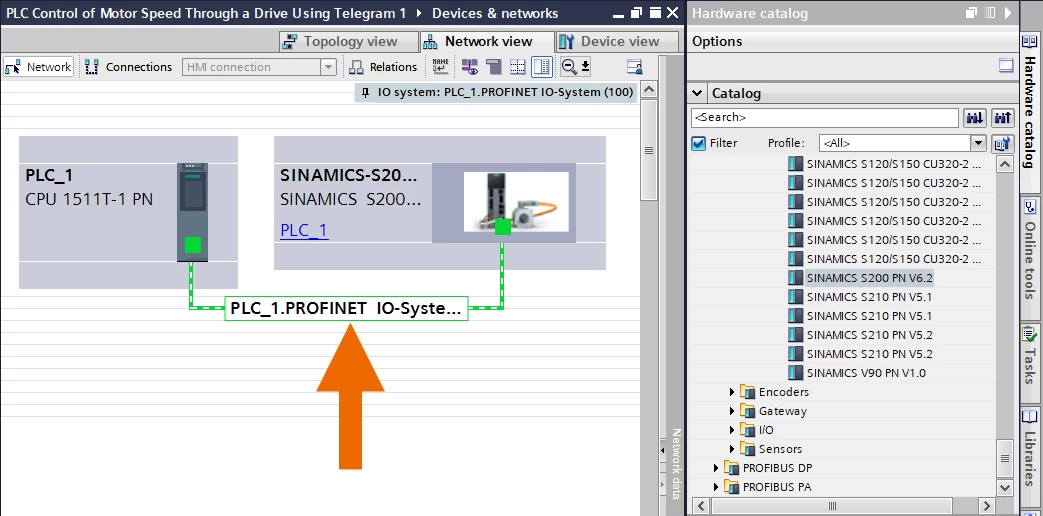
图 4.5 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -在 PLC 和伺服驱动器之间建立连接
进入网络视图后返回设备视图。从下拉菜单中的选项中选择 PLC。选择查看 CPU 属性。在常规属性列表中选择以太网地址以进行参数修改。编辑 IP 地址,但请注意不要设置与该网络上的其他设备冲突的自定义 IP 地址。
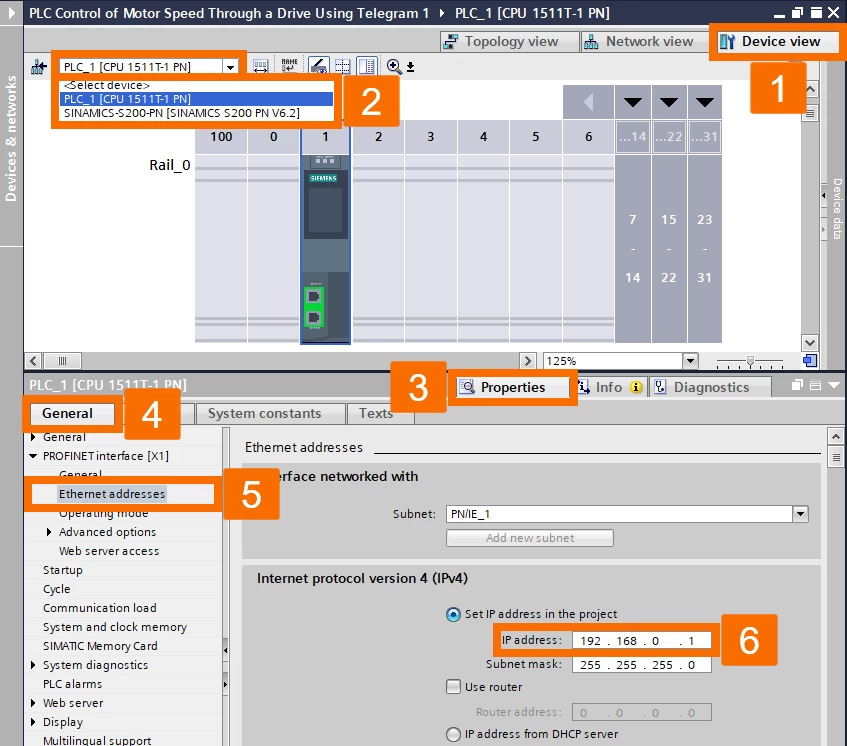
图 4.6 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 - PLC 通信设置通过驱动器对电机速度进行 PLC 控制
单击下拉菜单,这次选择 SINAMICS S200 PN Drive。选择标有硬件目录的选项并单击它。展开包含子模块的文件夹。选择“标准电报 1”并双击将其放入项目中。插入报文后,您将在设备概览屏幕上找到它,并且与之关联的 IO 地址将可见。输入和输出地址的长度都指定为 4 字节。用户可以自定义初始输入或输出地址以适应他们的应用。
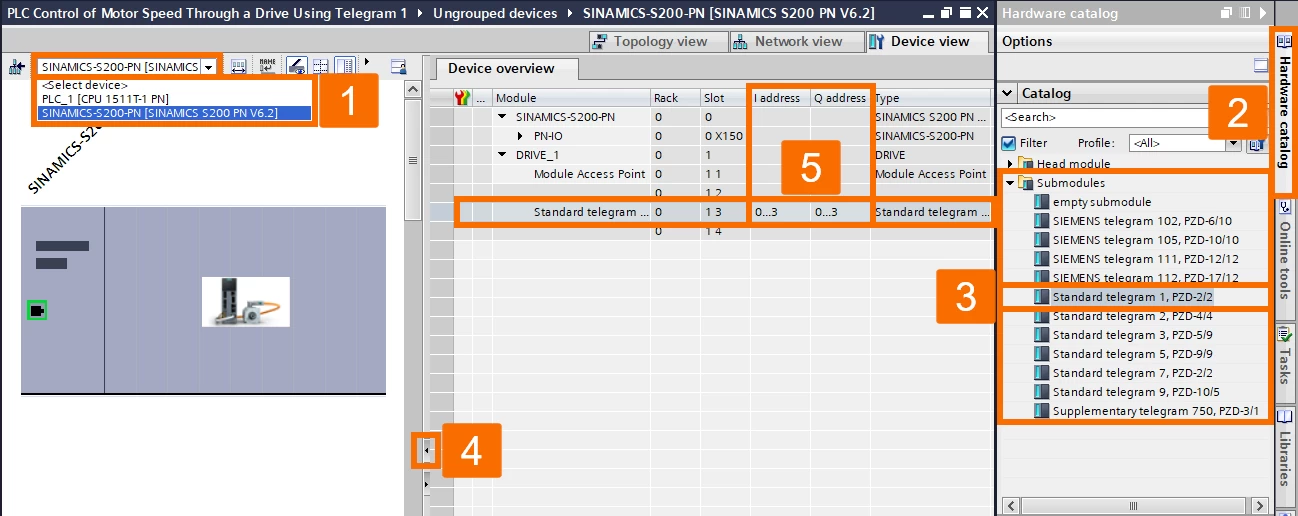
图 4.7 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 -伺服驱动器通信方法通过驱动器对电机速度进行 PLC 控制
在 S200 PN 驱动器的设备视图中,打开属性。从常规菜单中的可用选项中选择常规功能。该伺服驱动器的设备名称可以自定义,以符合用户的应用。例如,在此特定应用中,它已更改为 S200 PN。修改设备名称后,会出现新调整的名称。
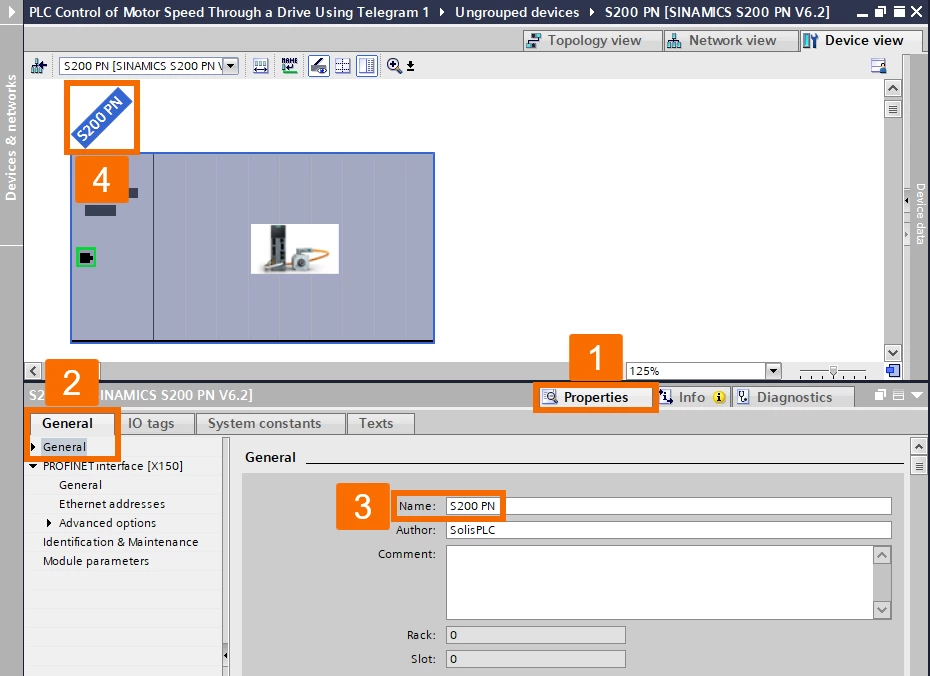
图 4.8 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -修改伺服驱动器名称
通过打开以太网地址部分,可以修改 IP 地址。
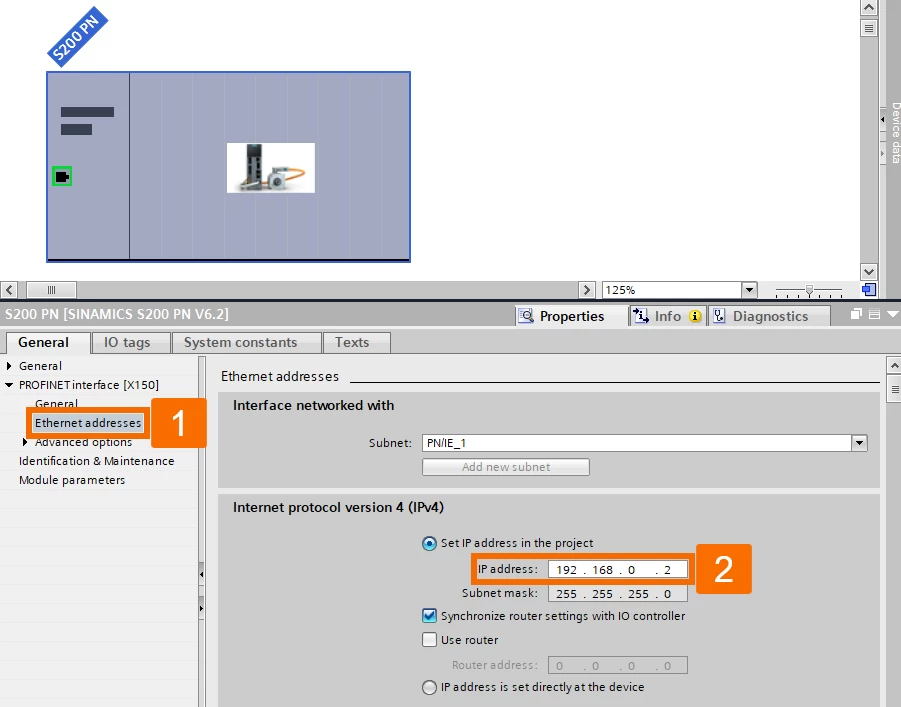
图 4.9 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 -伺服驱动器通信设置通过驱动器对电机速度进行 PLC 控制
使用移动指令进行 PLC 控制
准备好了解如何使用 MOVE 指令来管理 S200 PN 系统。访问默认标签表或在 PLC 标签文件夹下创建一个新标签表。使用图 5.1 中突出显示的特定地址创建新的 PLC 标签。输入和输出地址应与图 4.7 中提供的速度设定值、控制字、实际速度和状态字的详细信息精确对齐。
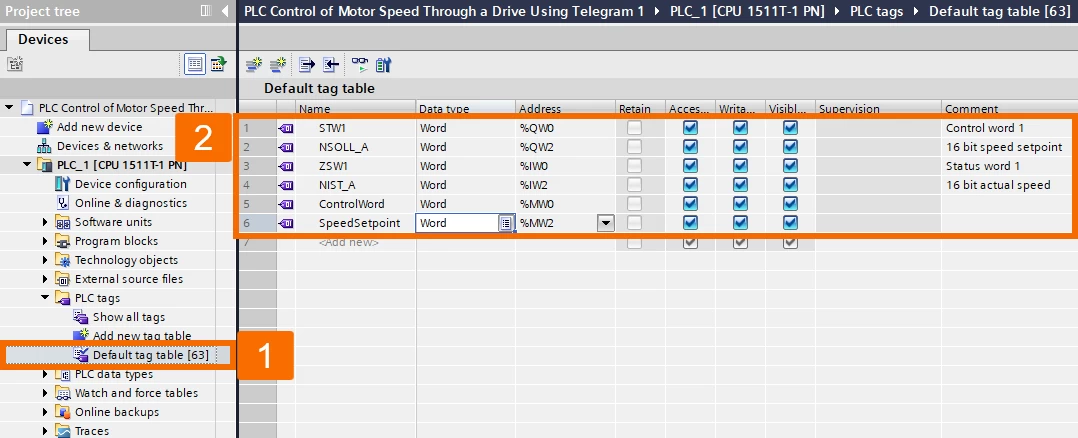
图 5.1 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -为编程逻辑创建标签
在程序块文件夹下找到主组织块 (OB1),然后双击它进行访问。选择说明任务卡。将 MOVE 指令从基本指令 -> 移动操作文件夹中拖放到网络 1 上。按照图 5.2 所示设置编程逻辑。
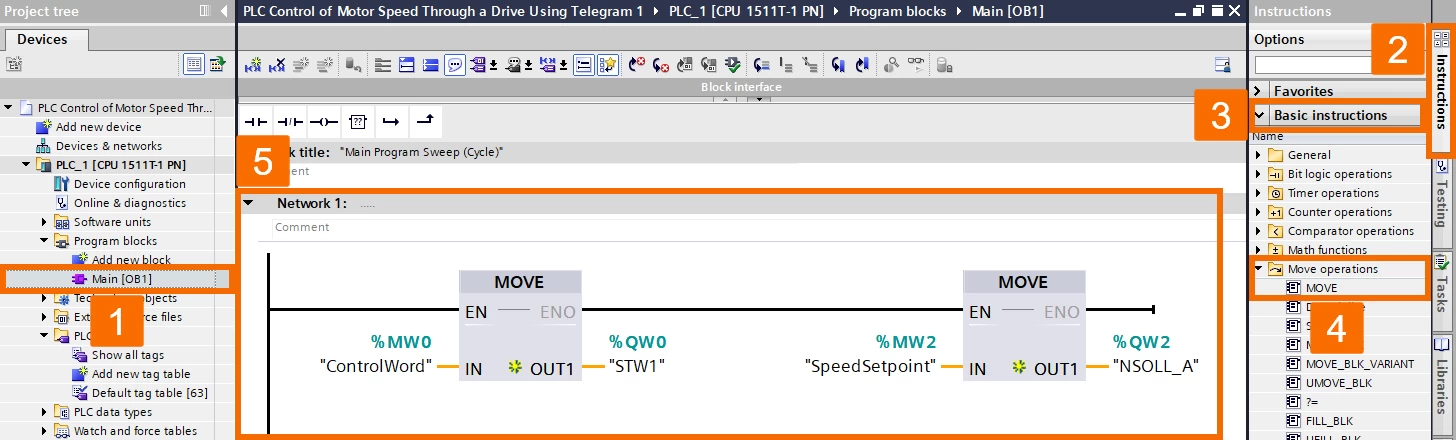
图 5.2 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -使用 Move 指令进行编程逻辑
通过双击添加新监视表项,您可以生成一个名为 Watch table_1 的新监视表并立即将其打开。通过合并状态监视和控制操作来修改监视表,镜像图 5.3 中显示的配置。
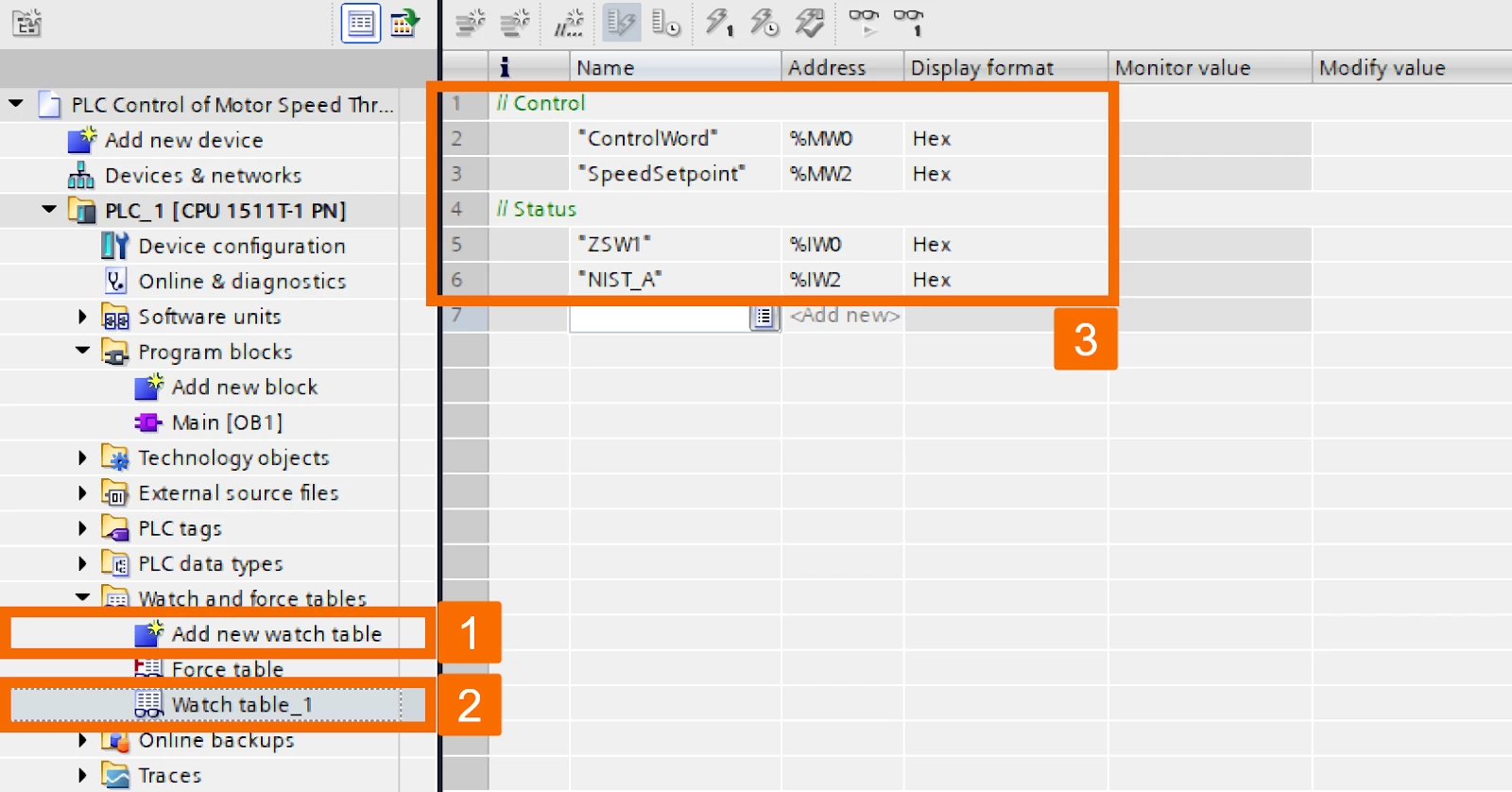
图 5.3 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -创建观察表
图 5.3:使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -
选择 PLC_1 文件夹,然后继续编译项目并通过左键单击顶部工具栏上的图标将其下载到 PLC。
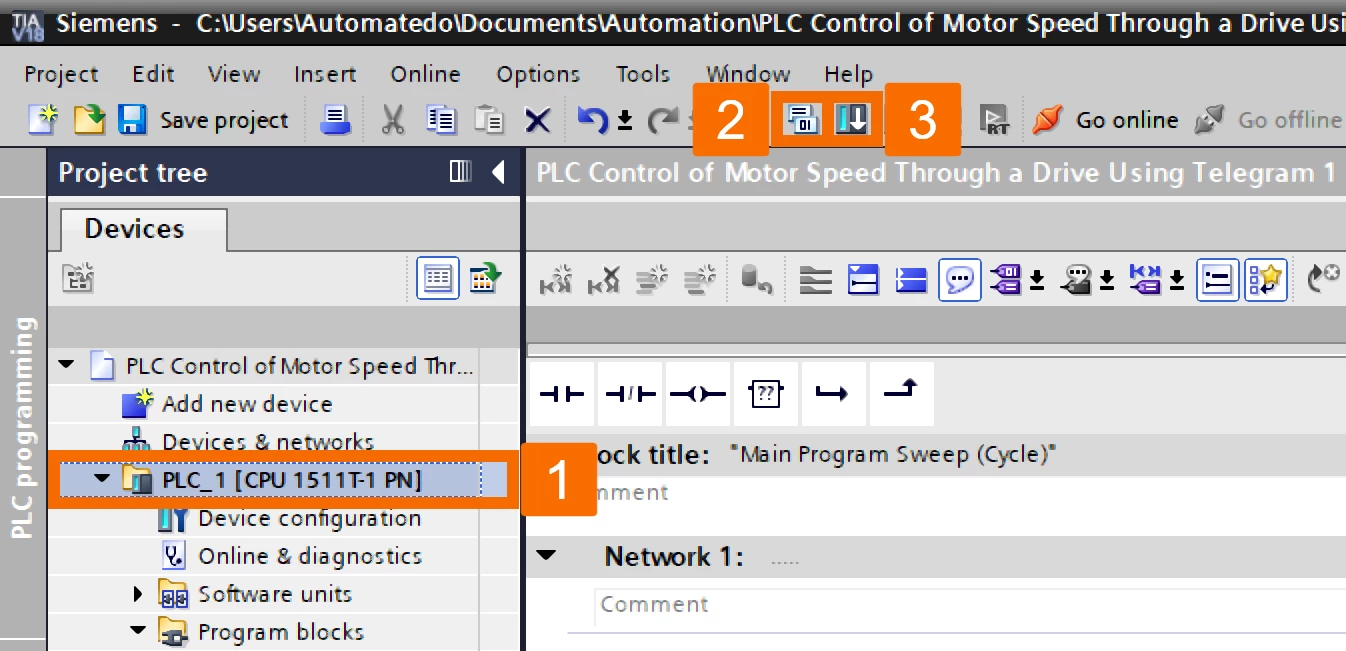
图 5.4 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -编译和下载项目
双击 Watch table_1 来访问它。通过单击由眼镜图标表示的监视按钮来启用变量监视和强制功能。
图 5.5 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -将监视表置于在线模式
将控制字自定义为 16#047E 的值并更改速度设定值,将其设置为 16#0500。单击“修改”按钮以启动值更改。调整控件后,您将看到反映更新的驱动器状态。对于报文 1,需要注意的是,速度设定值用作参考设定值,并且值 16#4000H 对应于 P2000 中参考速度的 100%。
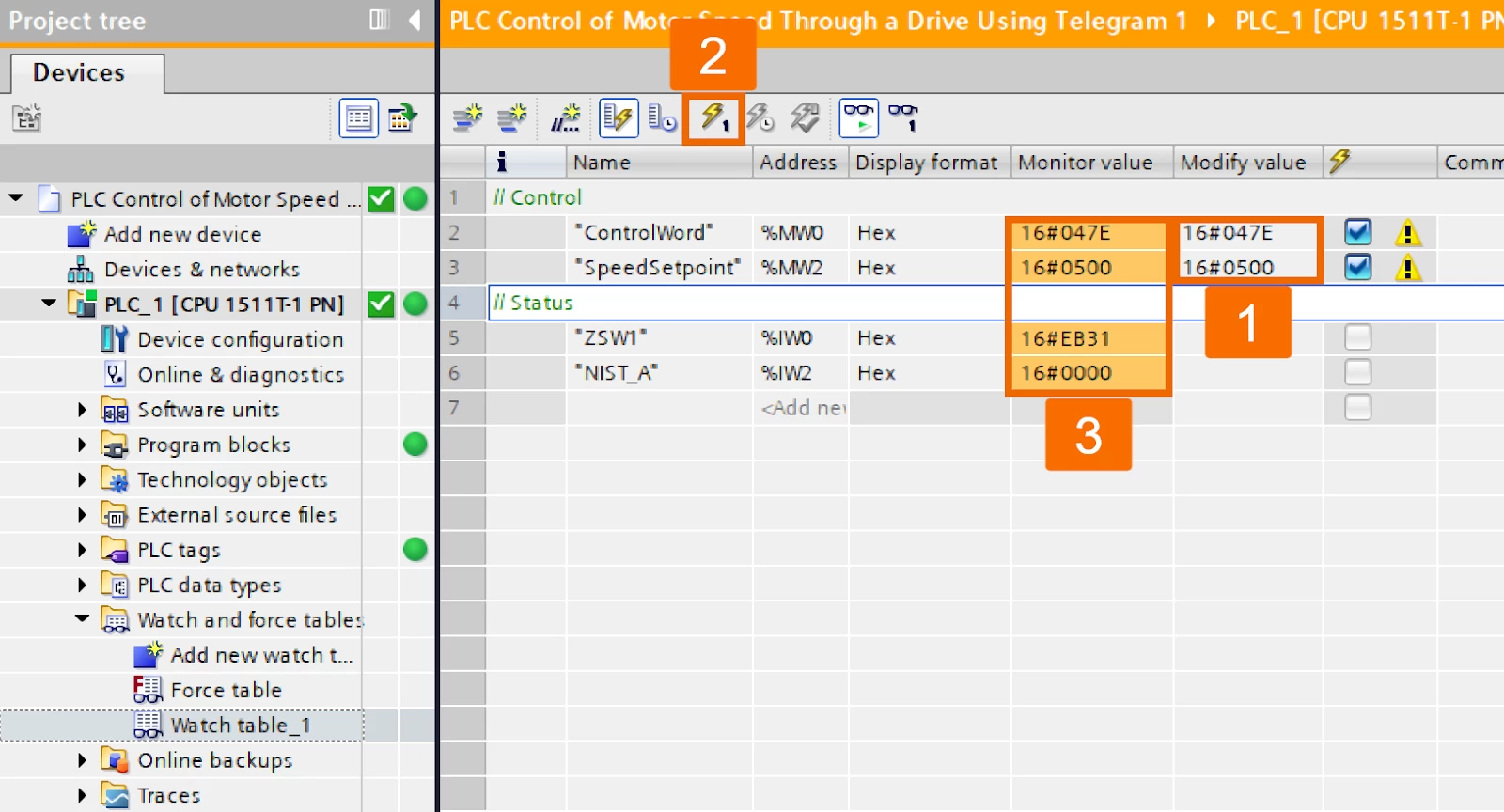
图 5.6 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -修改控制字和速度设定值
通过将控制字更改为 16#047F 的值来激活驱动器,并确保监控伺服驱动器的状态。
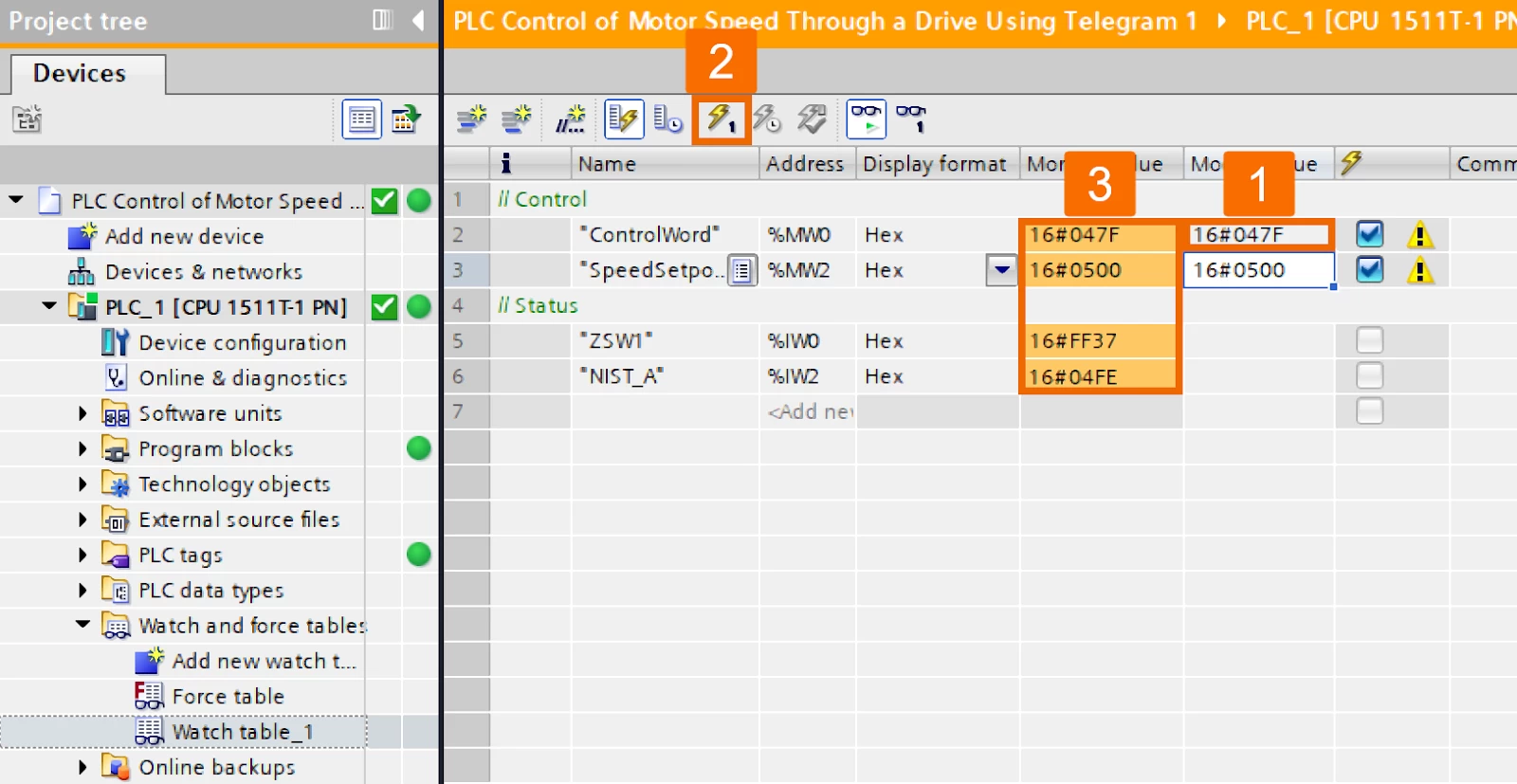
图 5.7 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -激活伺服驱动器
将控制字切换为 16#047E 的值,以停止伺服驱动器并跟踪其情况以进行监控。
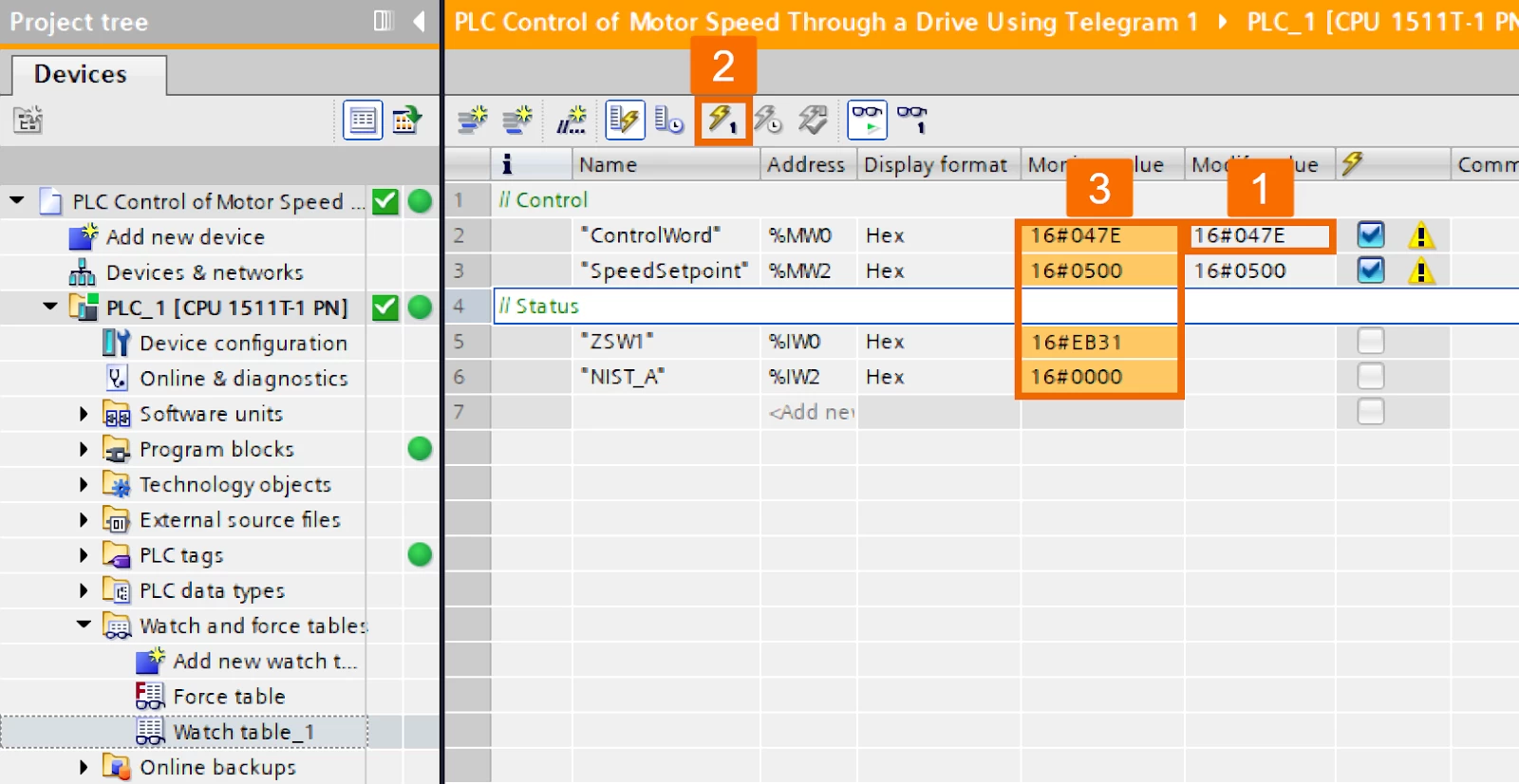
图 5.8 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -停用伺服驱动器
考虑必要的调整,将控制字修改为 16#0C7F,以相反方向启动伺服驱动器并相应监控其状态。
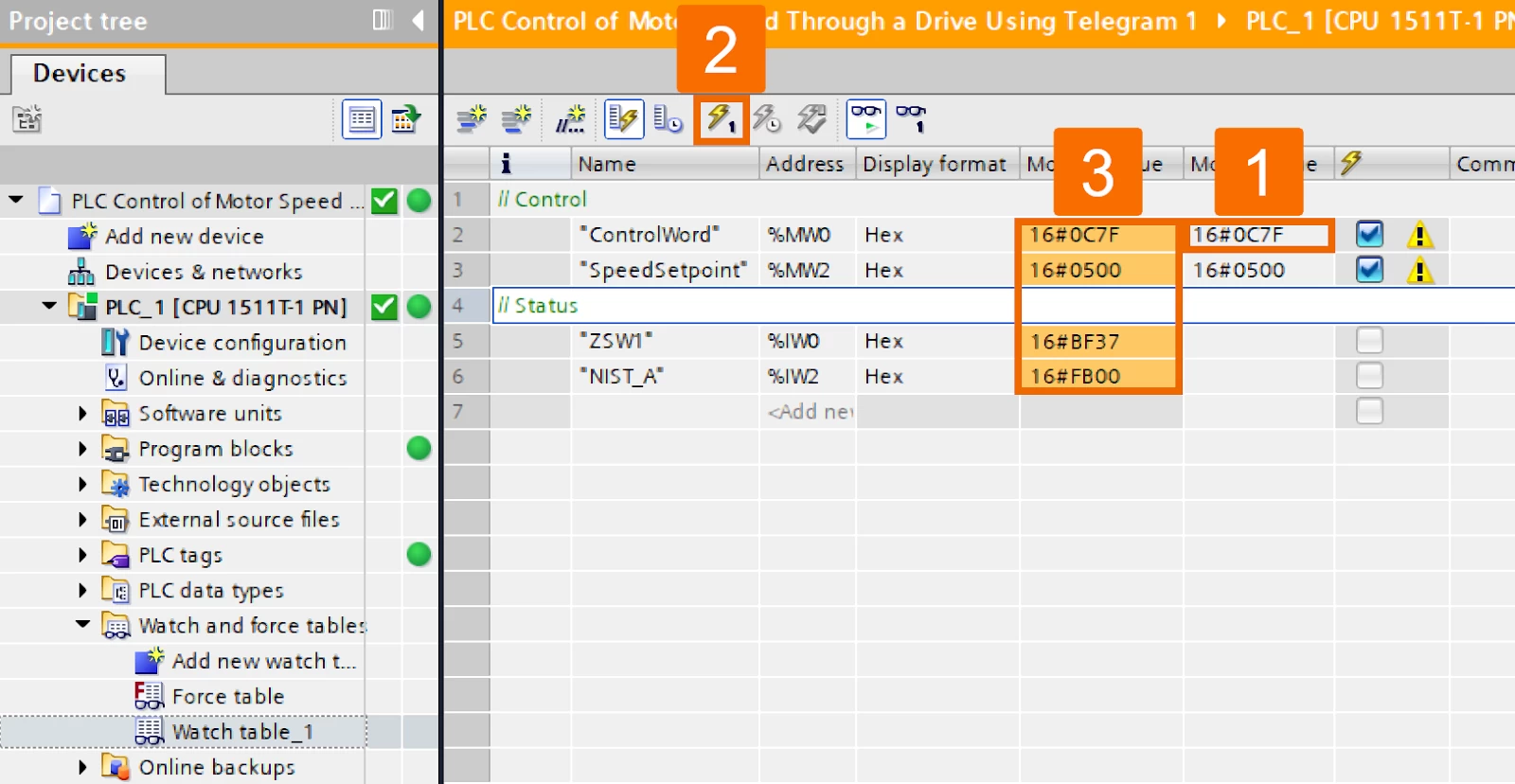
图 5.9 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -沿相反方向激活伺服驱动器
调整控制字为 16#0C7E 或 16#047E 的值,使伺服驱动器进入停止模式,并记得有效观测其状态。
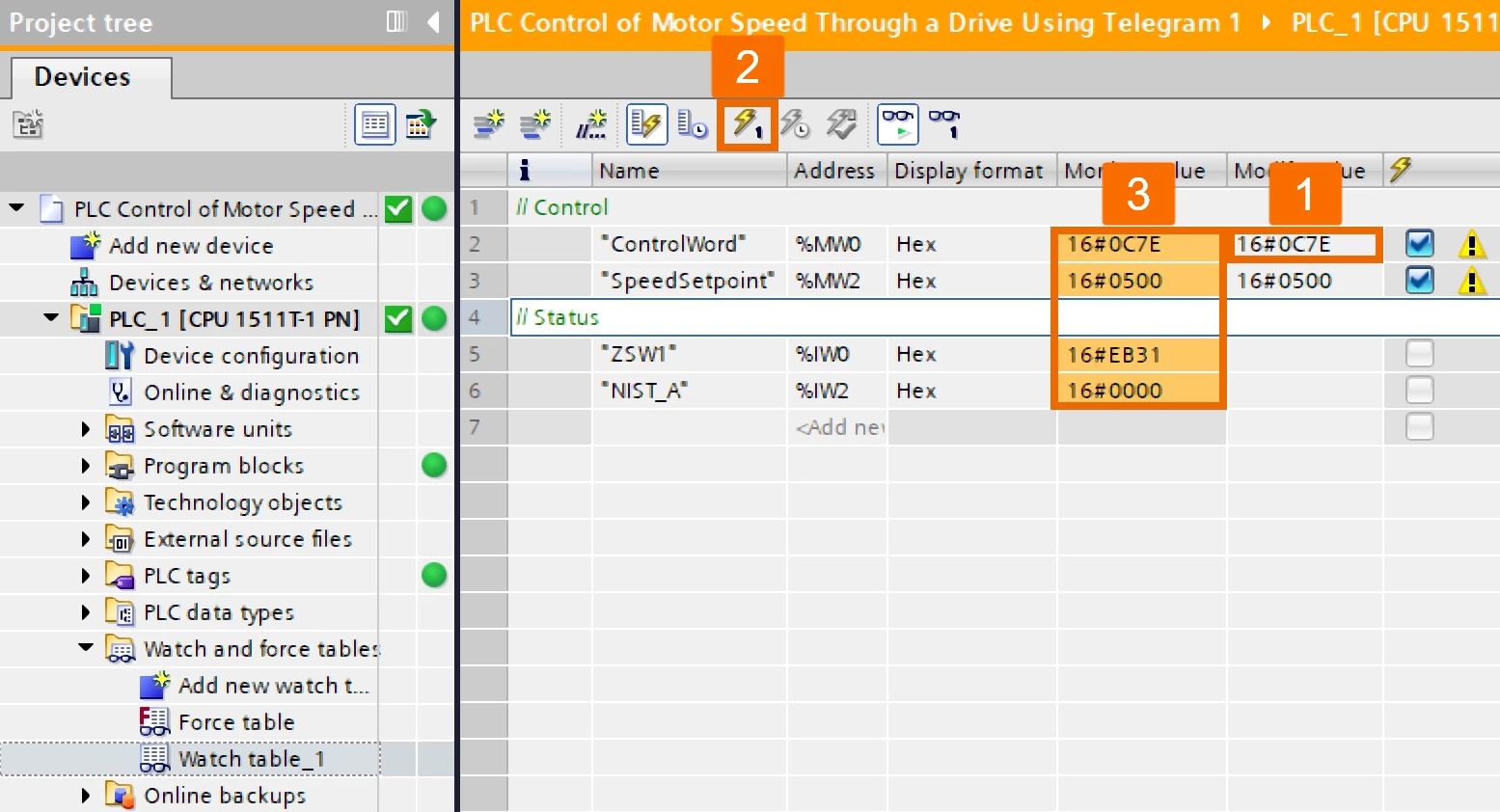
图5.10 - 西门子SINAMICS S200伺服驱动系统| 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -使用不同的控制字值停用伺服驱动器
使用 SinaSpeed 功能块进行 PLC 控制
让我们探索如何利用 SinaSpeed 功能块像专业人士一样平滑地控制 S200 PN 系统。继续访问默认标签表或在 PLC 标签文件夹中创建一个新的标签表。使用图 6.1 中显示的指定地址开始生成 PLC 标签。
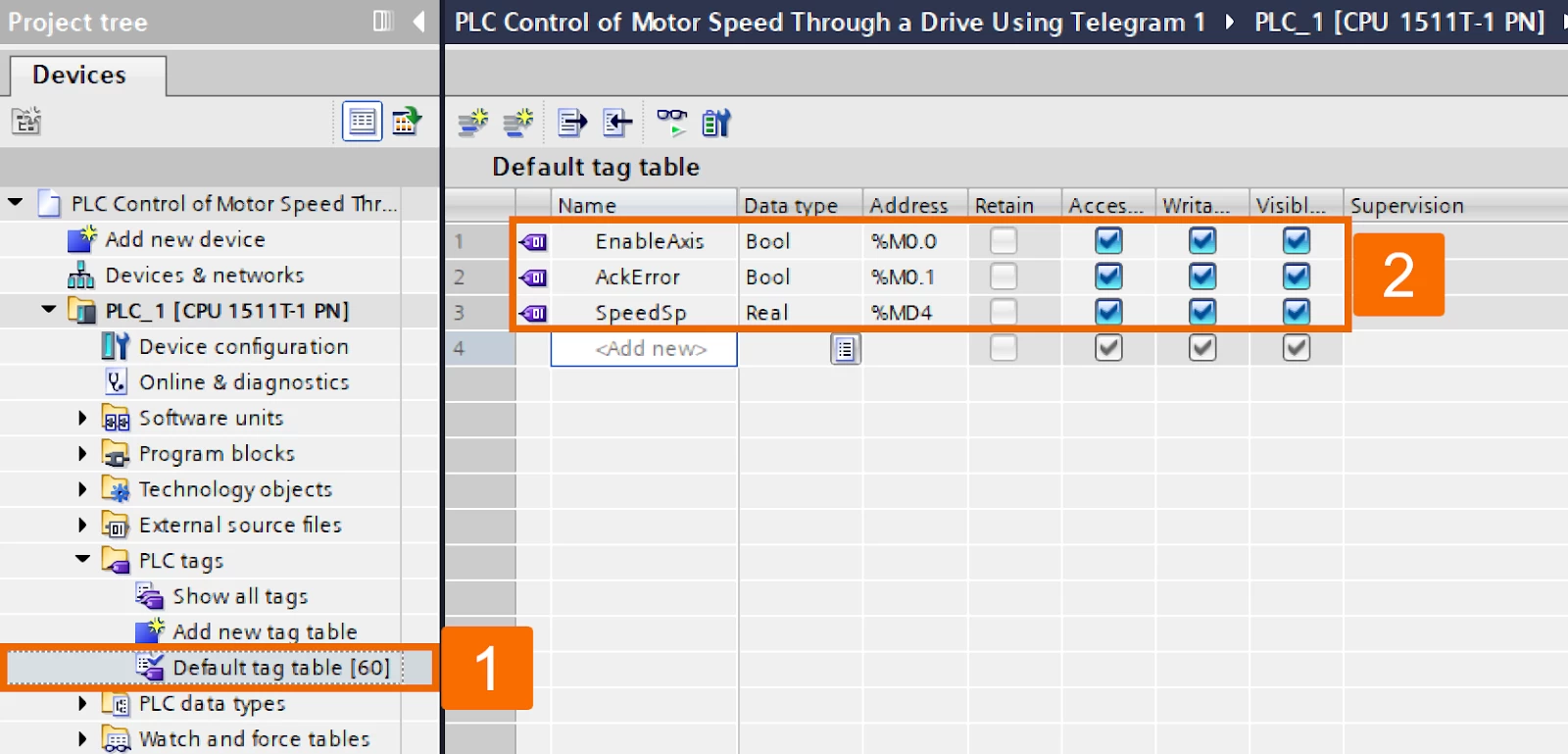
图 6.1 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -为编程逻辑生成标签
在默认标签表中,跳转到系统常量视图。在列表中搜索目标硬件标识符并捕获分配给该常量变量的值。
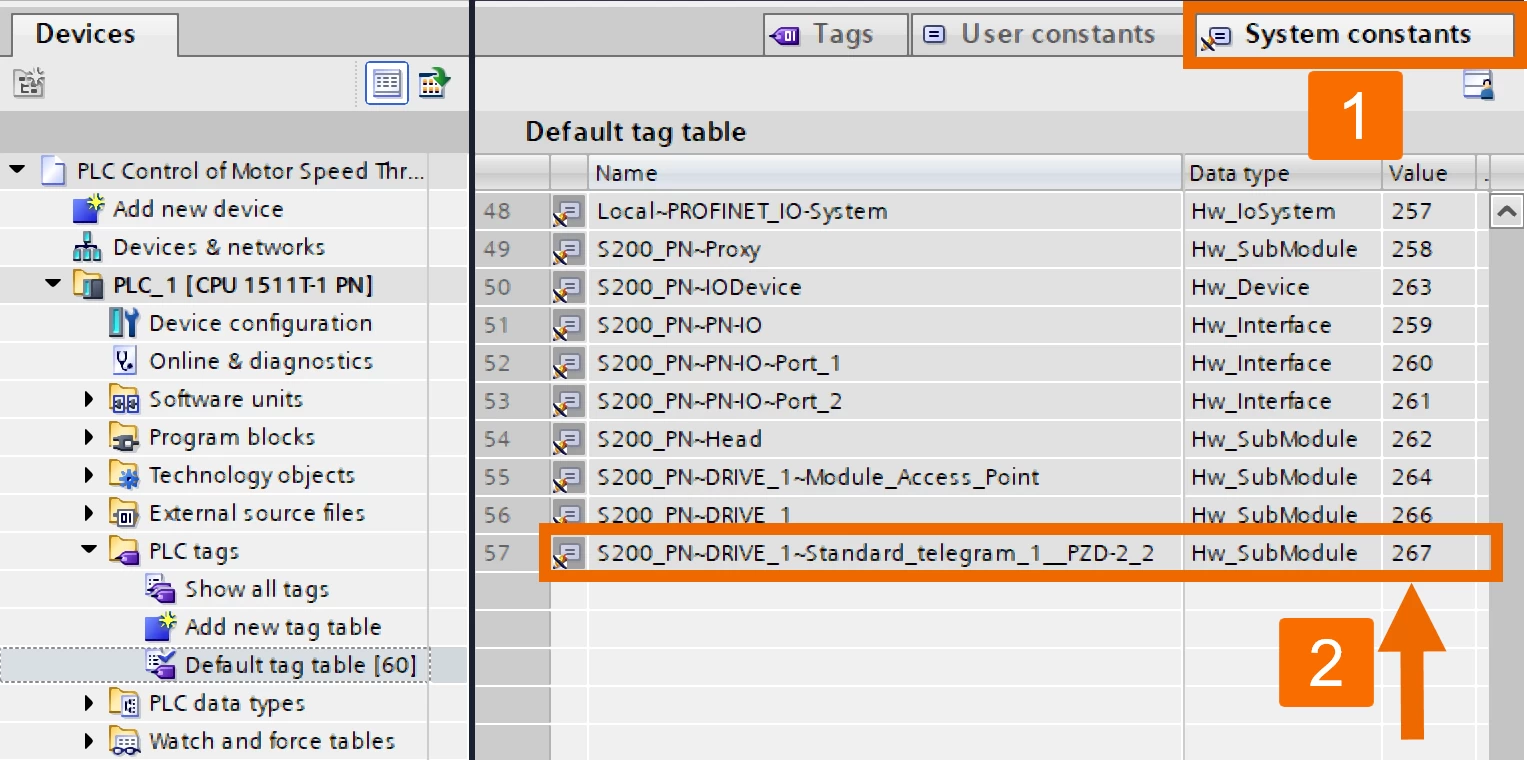
图 6.2 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -定位伺服驱动器硬件标识符
在程序块文件夹中找到主 OB1(组织块)并双击它。选择说明任务卡。从可选包文件夹中获取 SinaSpeed 指令,并使用拖放操作将其释放到网络 1 上。根据您的喜好自定义数据块的名称,您可以让 TIA Portal 自动分配 DB 编号或您自己手动分配。按 OK 按钮确认将功能块插入到项目中。这是提醒您可以从此处下载功能块及其文档。
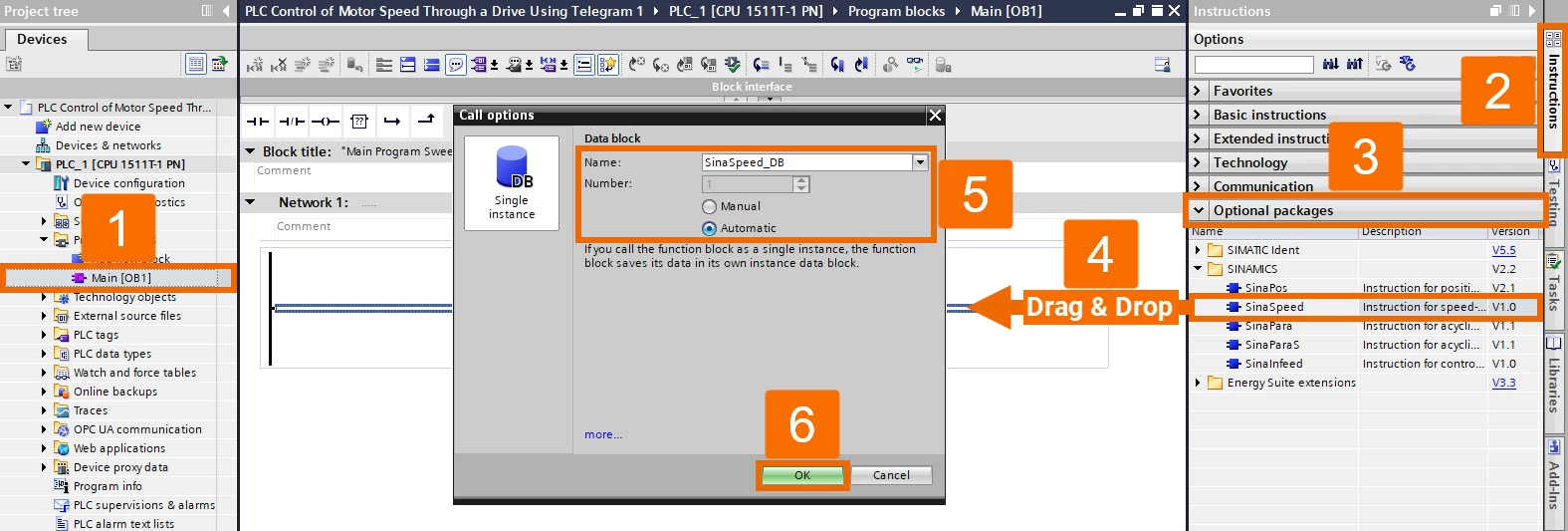
图 6.3 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -为编程逻辑添加 SinaSpeed 功能块
根据图 6.4 所示的可视化表示在程序中实现逻辑。当处理 HWIDSTW 或 HWIDZSW 时,您可以分配常量变量名称或直接分配常量变量值。进行工程编译,然后下载到PLC。
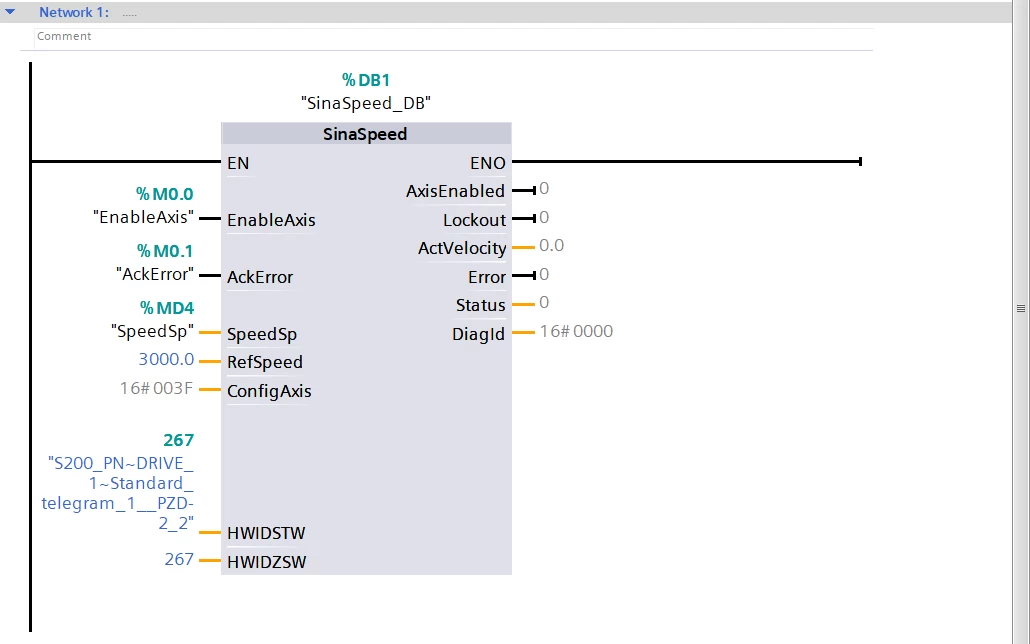
图 6.4 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -配置 SinaSpeed 功能块
按眼镜按钮激活程序逻辑监控模式。
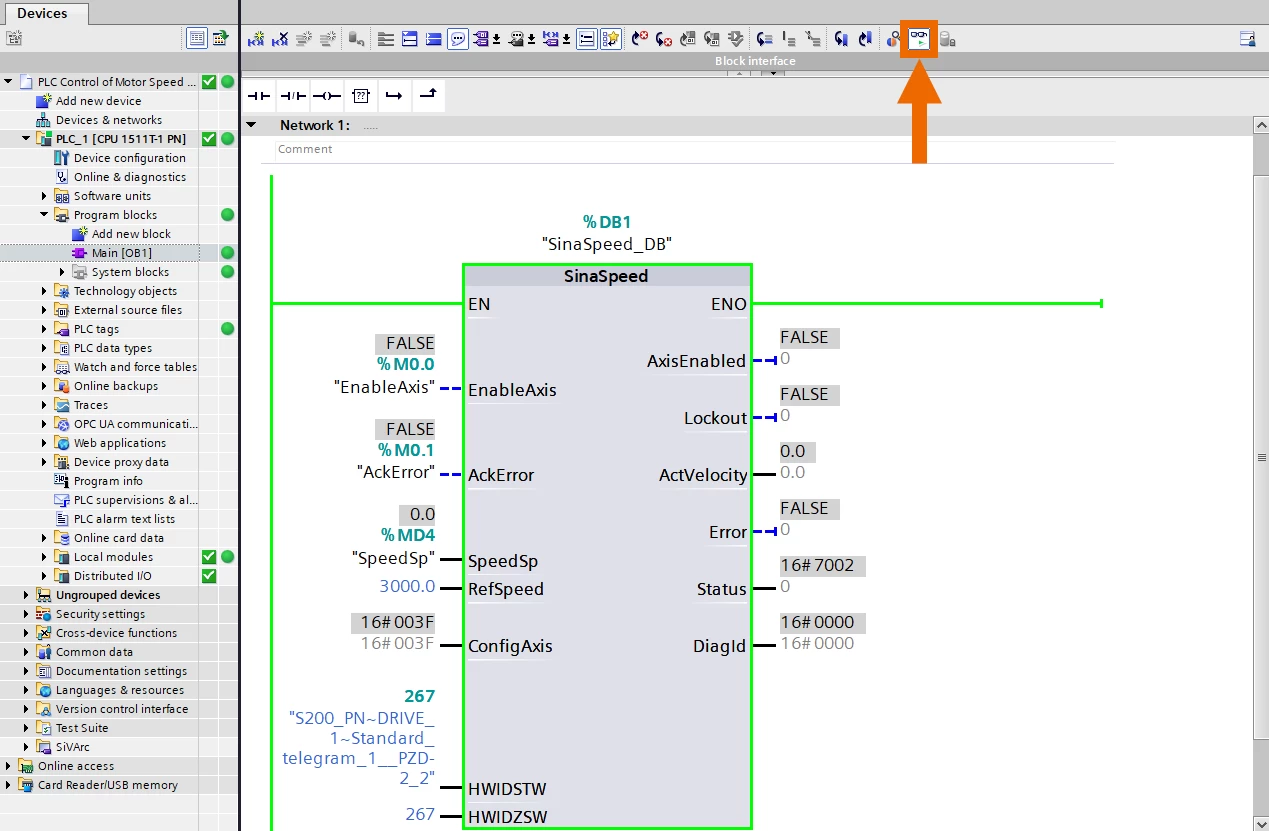
图 6.5 - 西门子 SINAMICS S200 伺服驱动系统 | 使用 Telegram 1 通过驱动器对电机速度进行 PLC 控制 -将逻辑置于在线模式
调整速度设定值并激活轴以启动驱动。
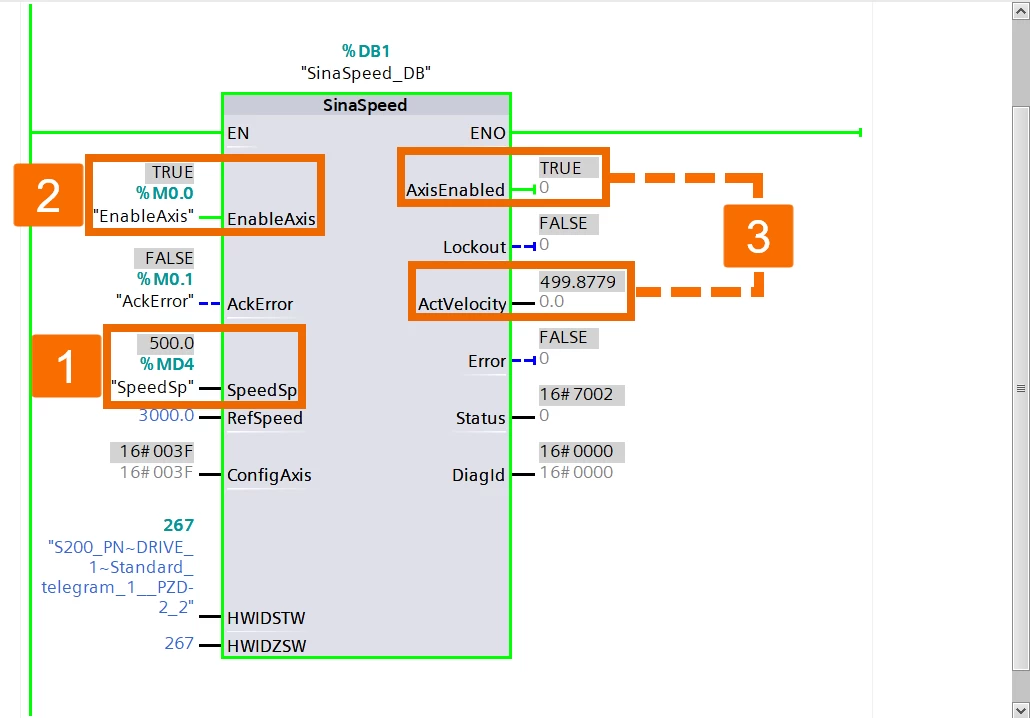
图 6.6 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -激活伺服驱动器
将速度设定值设置为负值,重新启用轴,并观察电机以相反方向旋转。
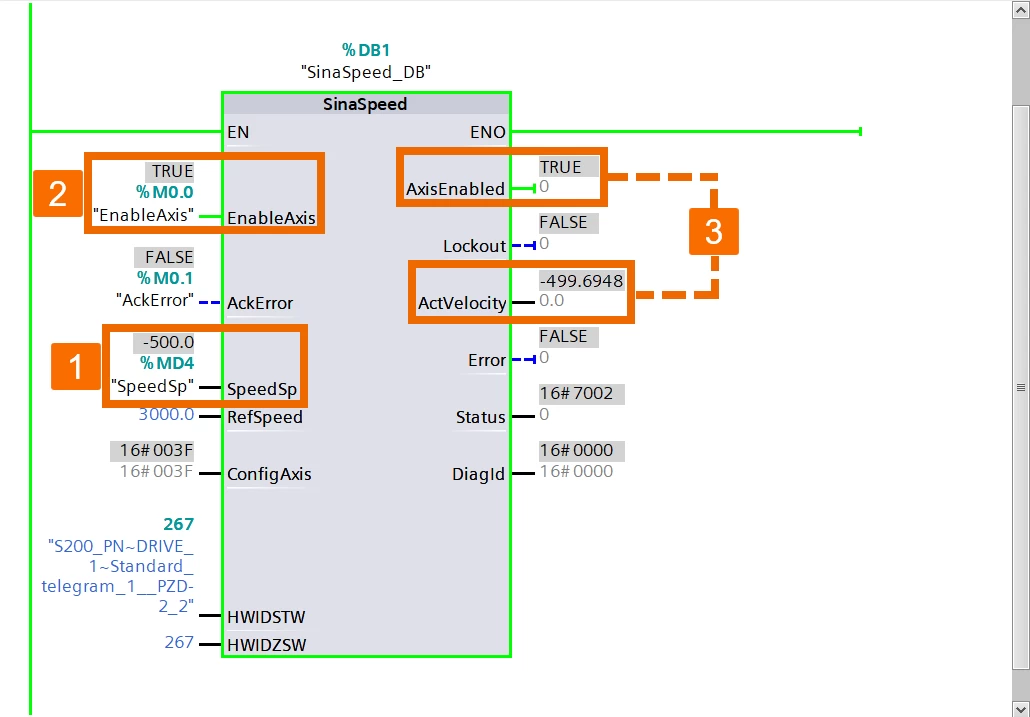
图 6.7 - 西门子 SINAMICS S200 伺服驱动系统 | 使用报文 1 通过驱动器对电机速度进行 PLC 控制 -沿相反方向激活伺服驱动器
结论
总之,您了解了使用 Telegram 1 通过伺服驱动器对电机速度进行 PLC 控制。您了解了如何为此自动化任务建立连接以及如何连接硬件。您已熟悉如何下载和安装所需伺服驱动器的 GSDML 文件。您了解了如何在 TIA Portal 中配置硬件(PLC 和伺服驱动器)。最后,您掌握了如何使用 Move 指令设置 PLC 控制或实现 SinaSpeed 功能块来观察电机速度的状态。