通过 TIA Portal 优化西门子伺服驱动器的扭矩控制
介绍
SINAMICS S200 PN 伺服驱动系统的一项炫酷功能称为 Telegram 750,它可以让您微调扭矩设置,例如额外扭矩、最大和最小限制以及实际扭矩。本教程将引导您完成使用SIMATIC S7-1500 PLC 施加扭矩的过程。此外,您还可以将本教程的内容扩展到使用SIMATIC S7-1200 PLC 进行扭矩应用。为了快速、清晰地了解自动化任务,请参阅图 1.1。
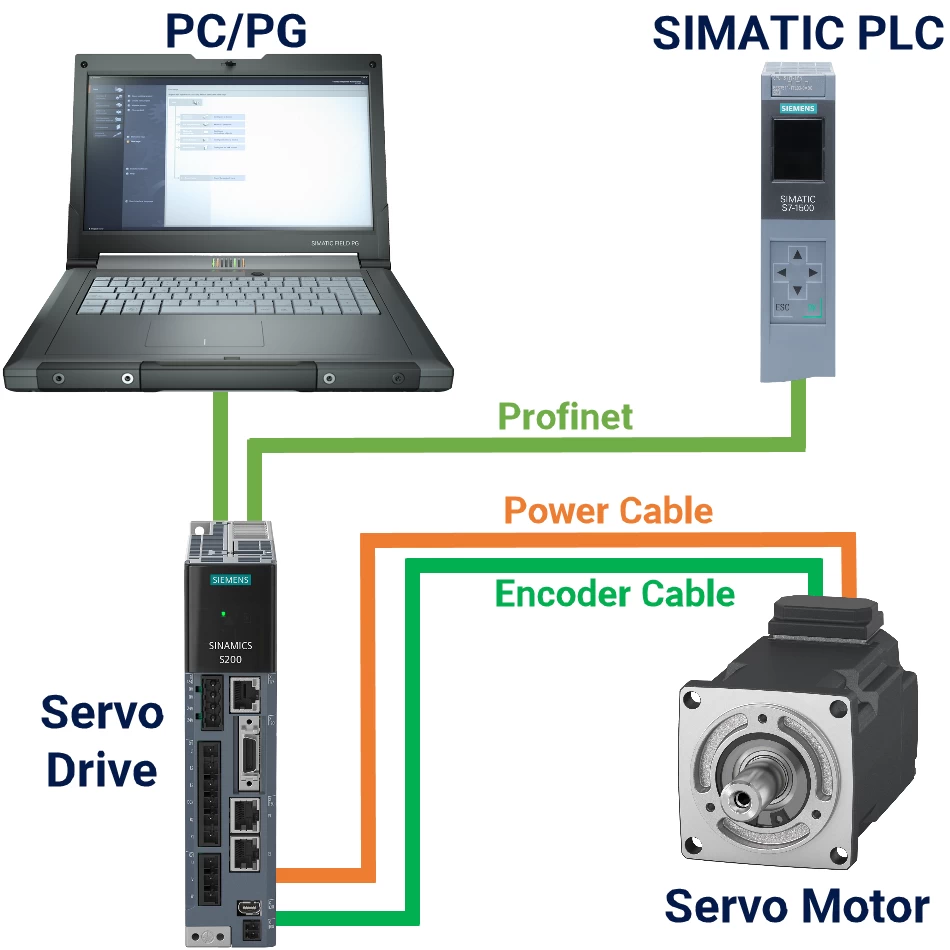
图 1.1:向西门子 S200 伺服驱动器施加扭矩 - 自动化任务概述
先决条件
您需要遵循本教程:
- 您需要在个人计算机上安装 TIA Portal 软件。尽管本教程涉及版本 18,但请放心,其他版本的 TIA Portal 也可以正常工作。
- 您需要熟悉如何在 TIA Portal 中安装所需伺服驱动器的GSDML 文件。
- 您应该了解如何将 PLC 和伺服驱动器硬件添加到项目中。
- 您需要熟悉将库集成到 TIA Portal 项目中。
Telegram 750 的基本见解
表 2.1 显示了补充电报 750 的所有详细信息。对于该电报,控制器通过向驱动器发送三个字来建立通信,伺服驱动器向控制器发回一个字。
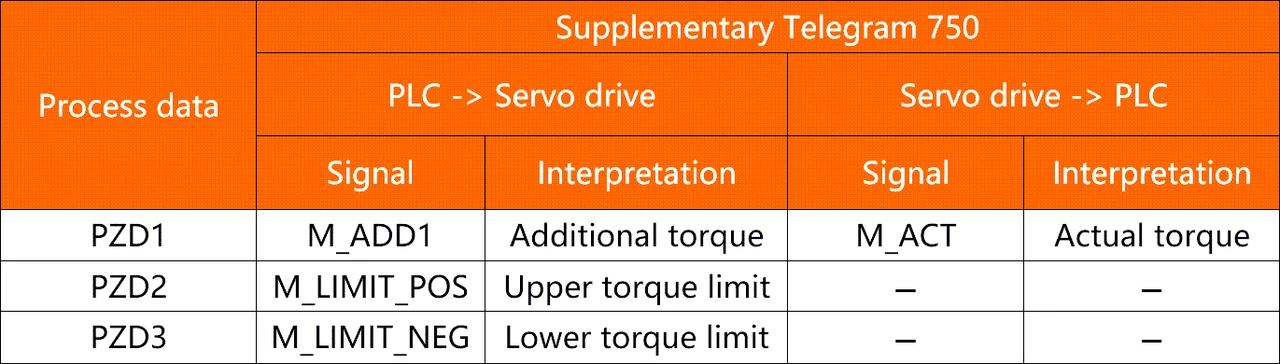
表 2.1:补充 Telegram 750 概述
如果您在使用 Telegram 750 时进行以下任何设置,您最好抓紧,因为电机会释放其内部速度恶魔并加速,就像无法停止一样:
- 使用 M_LIMIT_POS 将扭矩上限调整为负值
- 使用 M_LIMIT_NEG 将扭矩下限更改为正值
使用功能块施加扭矩
查看图 3.1,了解功能块的深入视图,该功能块是专为与 SIMATIC S7-1500 和 S7-1200 PLC 配合使用而设计的。集成 FB38052 意味着您不必担心创建相应的背景 DB — 它会自动发生。通过该功能块,您可以使用补充的 Telegram 750 循环控制 SINAMICS 驱动器。该功能块的输入接口包括 7 个不同数据格式的输入。这些输入在功能块的初始配置期间预先配置有初始值。此外,该模块的输出接口还带有七个不同数据格式的输出。
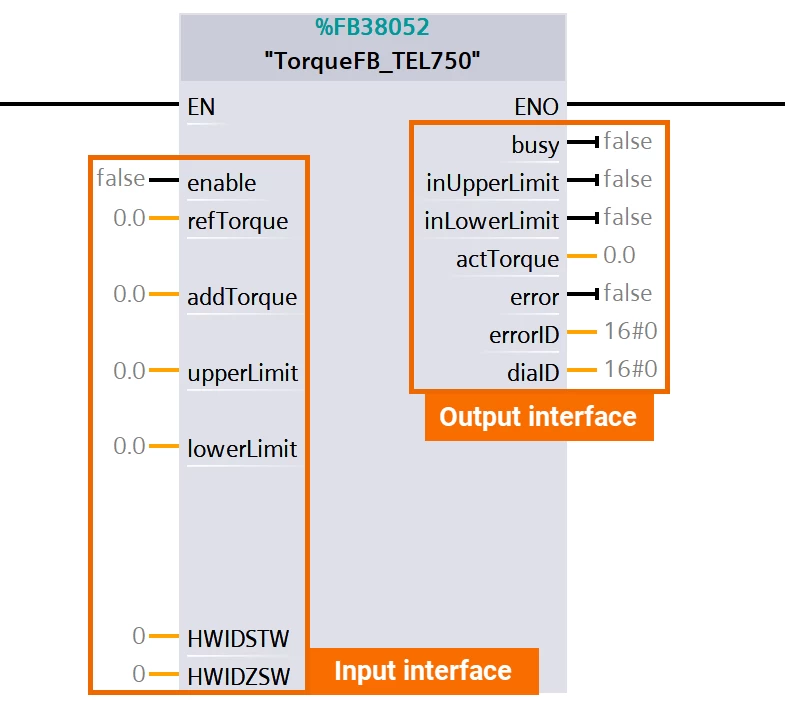
图 3.1:使用功能块 TorqueFB_TEL750 (FB38052) 对西门子 S200 伺服驱动器施加扭矩
以下是可以安装功能块的 OB。如果您需要循环中断任务,则 OB1 非常适合循环任务或 OB30(或类似的 OB)。
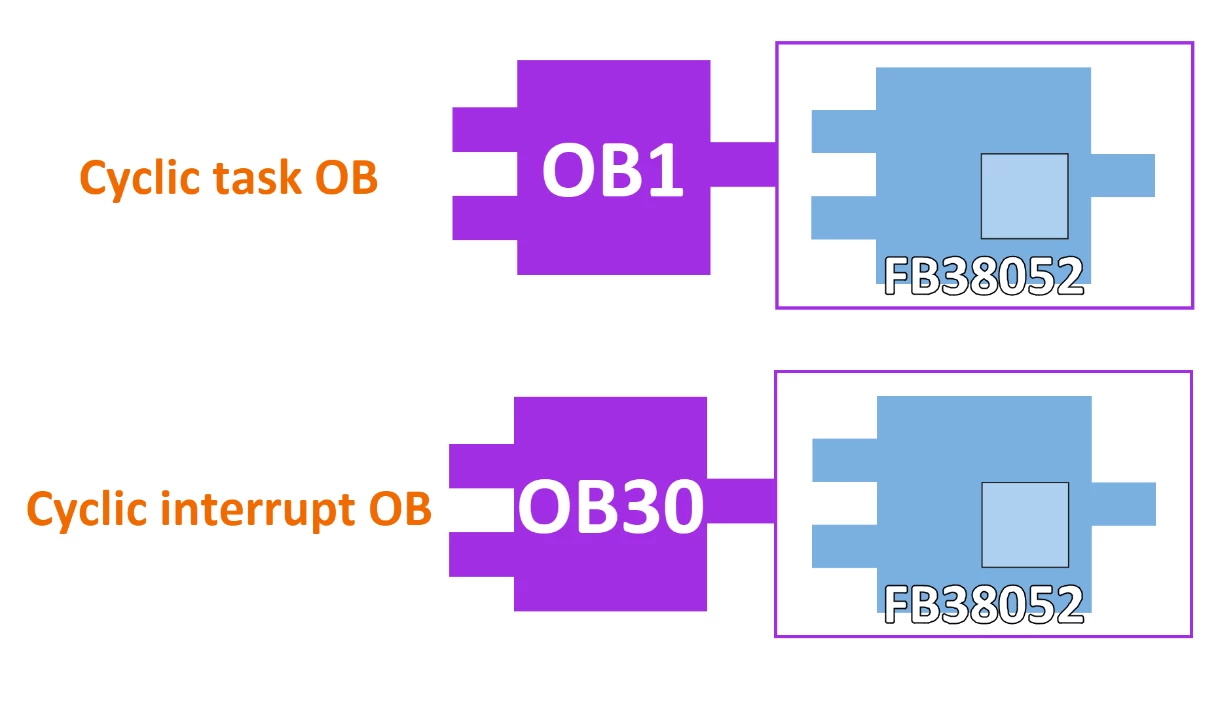
图 3.2:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 调用 OB
现在是时候借助 Telegram 750 和 Telegram 1 成为配置和运行扭矩应用程序的专家了。从创建 TIA Portal 项目开始,然后添加所需的 CPU 并将目标伺服驱动器 (SINAMICS S200 PN) 集成到项目中使用 GSDML 文件。
然后,切换到设备视图。通过从下拉菜单中的选项中选择来精确定位相关的 SINAMICS S200 伺服驱动器。在驱动器属性的常规菜单中为设备指定一个新名称。选择硬件目录选项卡。展开包含子模块的文件夹。将补充 Telegram 750 与标准 Telegram 1 一起安装到您的伺服驱动器中。
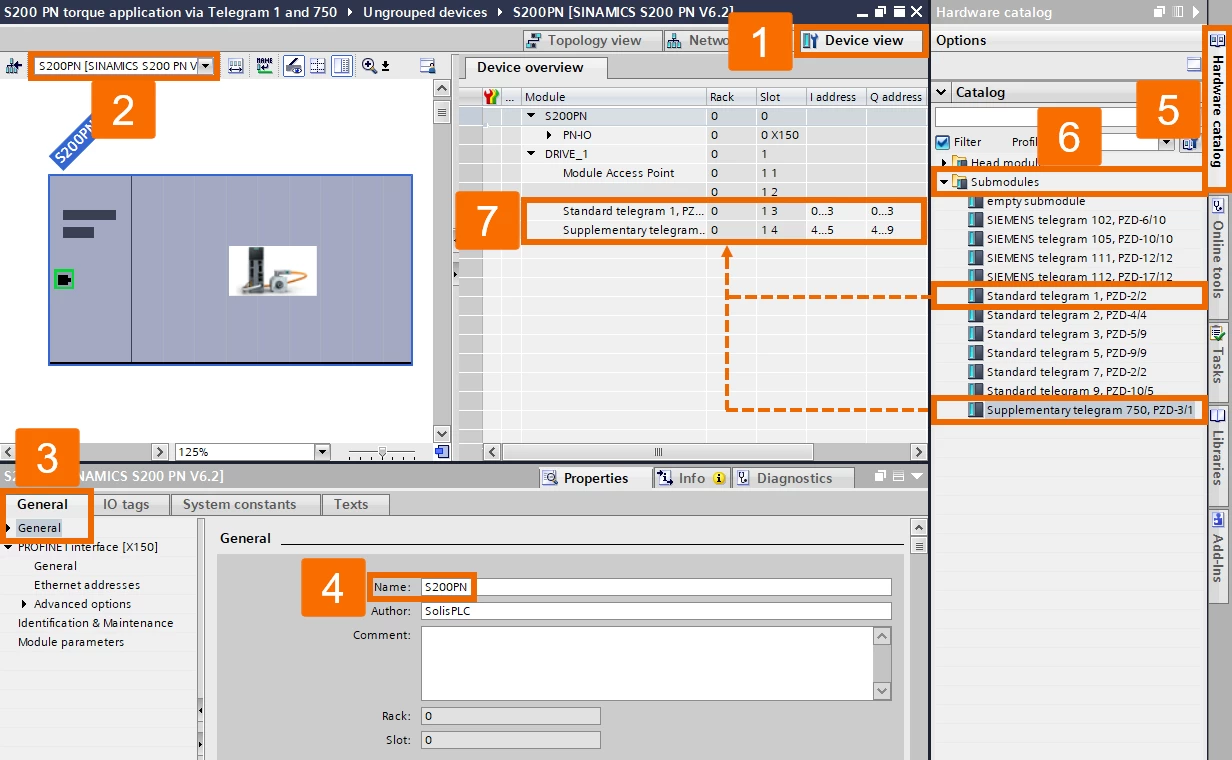
图 3.3:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 将 Telegram 750 和 Telegram 1 放入驱动器中
跳至网络视图并在 PLC 和 S200 伺服驱动器之间建立 Profinet 连接。
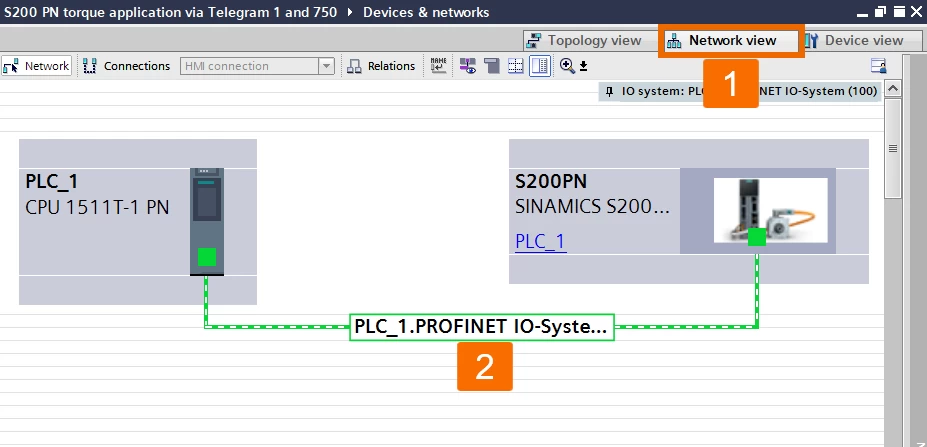
图 3.4:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 在 PLC 和驱动器之间建立 Profinet 连接
CPU 的 IP 地址是 192.168.0.1。
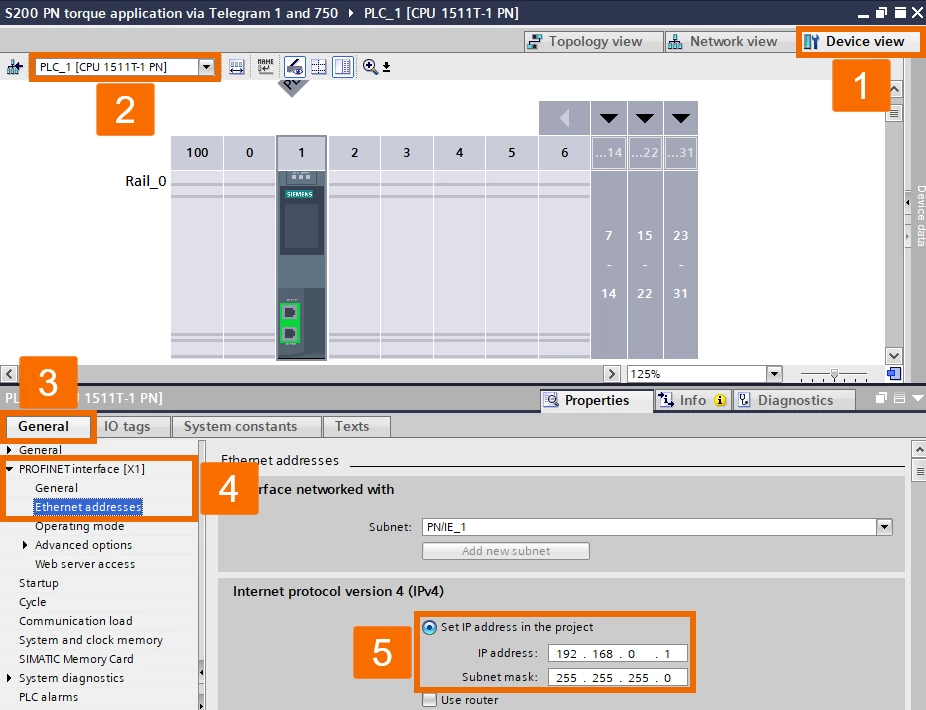
图 3.5:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 配置 PLC 的 IP 地址
S200伺服驱动器的IP地址为192.168.0.2。Profinet 连接配置的子网掩码为 255.255.255.0。
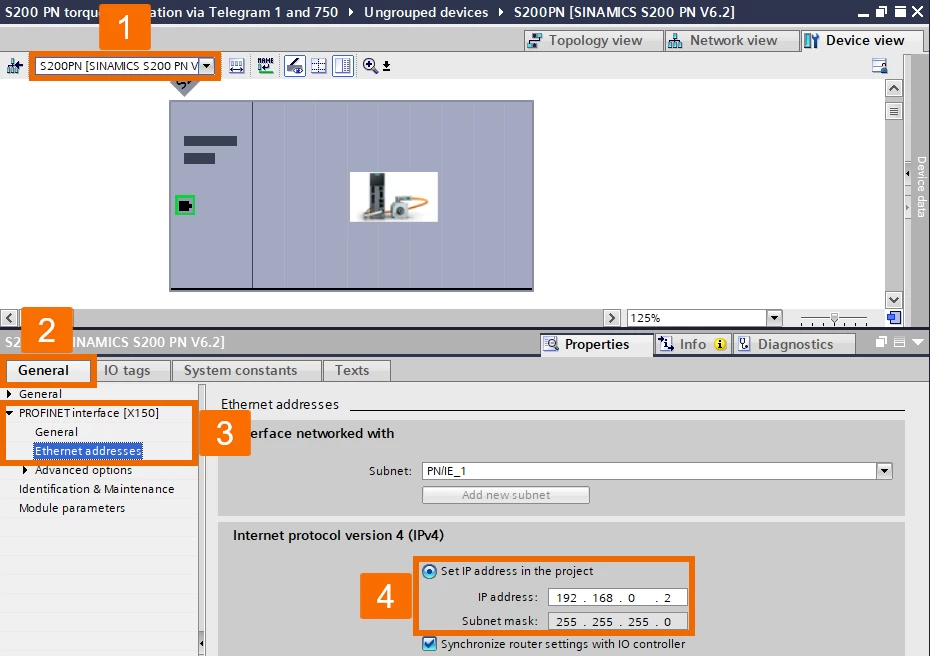
图 3.6:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 配置驱动器的 IP 地址
请联系您所在地区的西门子支持并请求下载 TorqueFB_TEL750 库,然后将其包含在您的项目中。
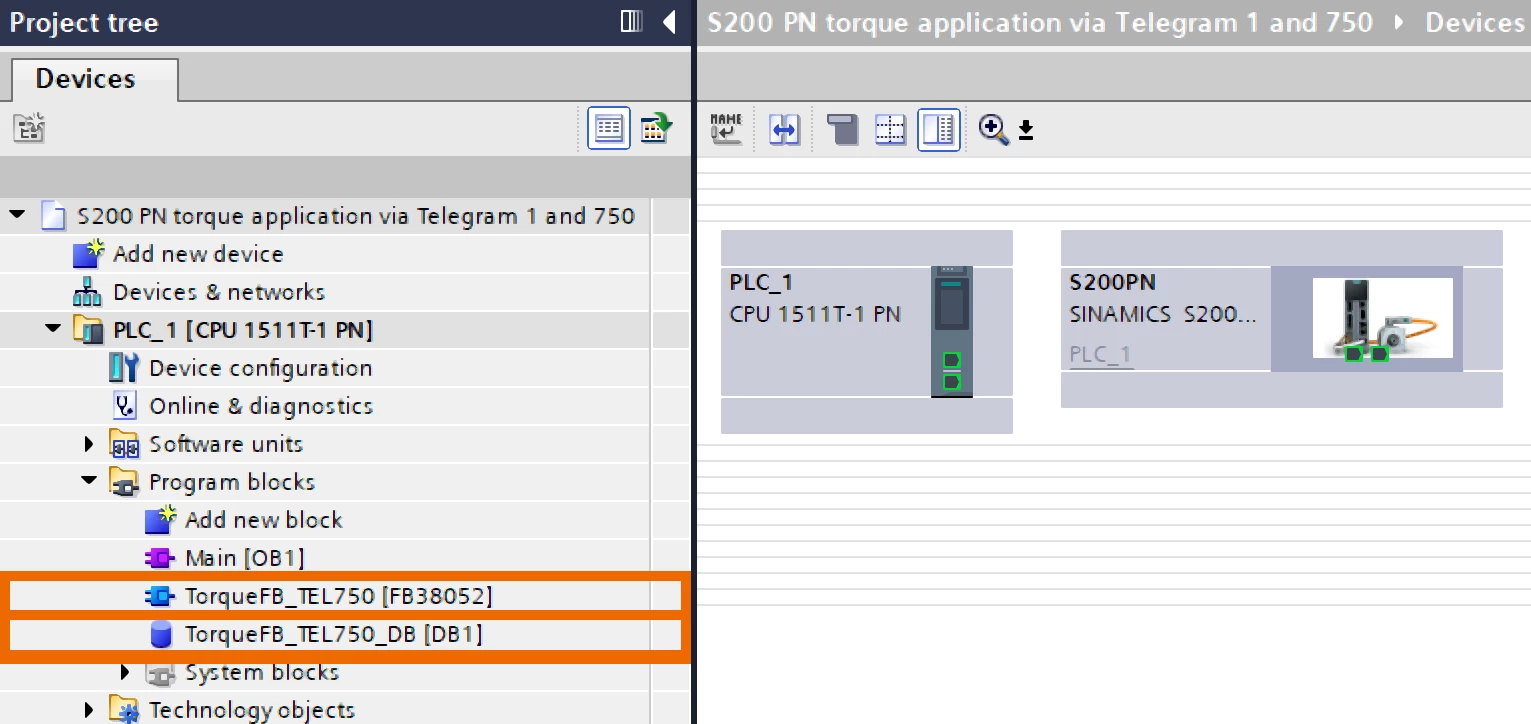
图 3.7:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 将 TorqueFB_TEL750 库包含到项目中
访问主 [OB1] 编程块并将 SinaSpeed 和 FB38052 放置在网络 1 中。
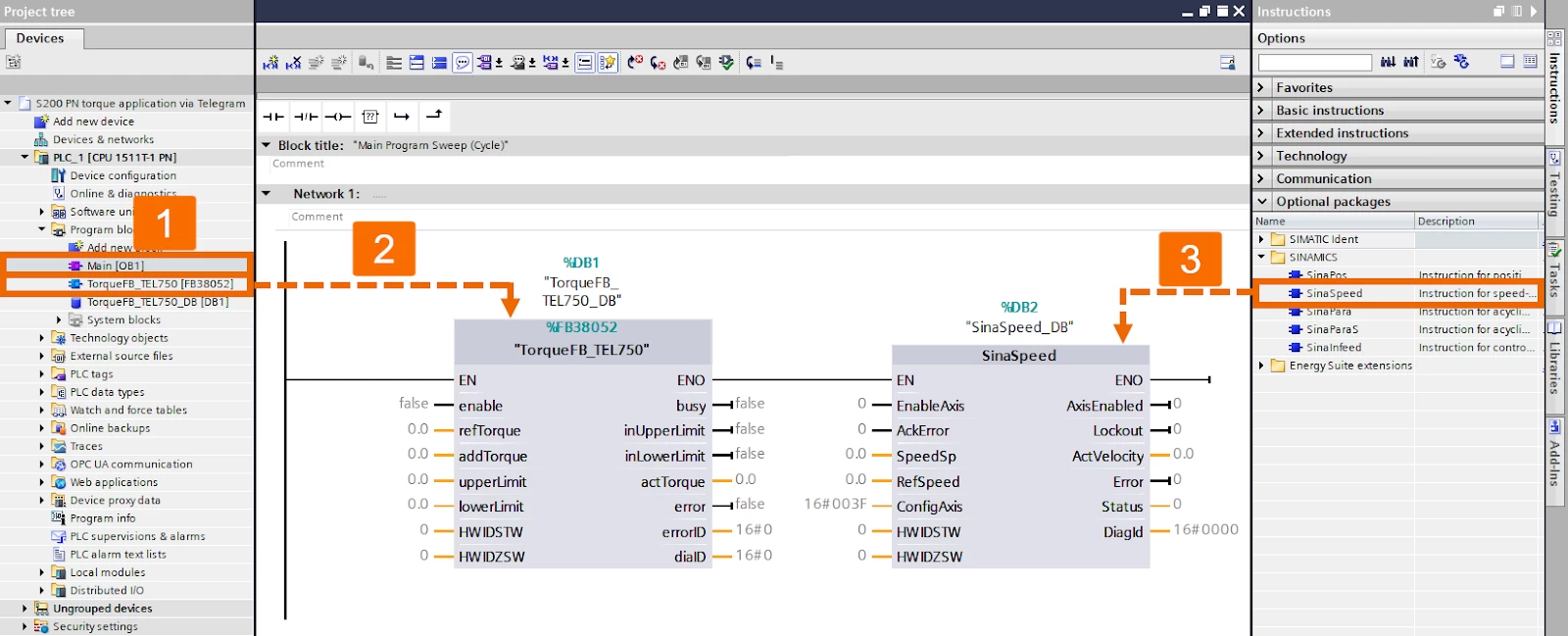
图 3.8:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 创建网络 1 的逻辑
按照图 3.9 和图 3.10 的引导,生成带有相关变量的全局数据块。
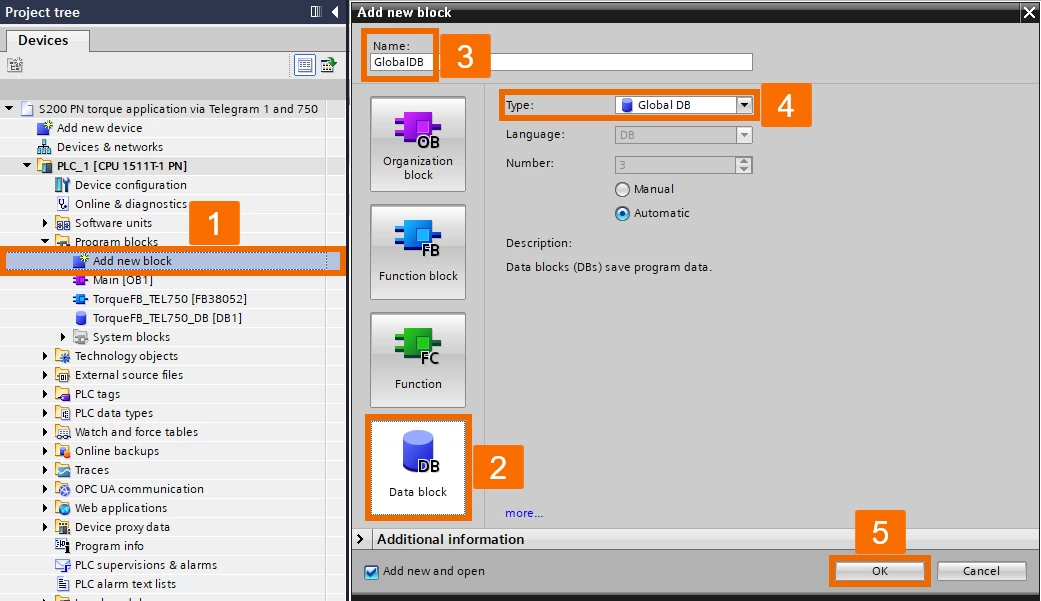
图 3.9:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 创建全局数据块
图 3.10:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 为全局数据块生成相关变量
使用您想出的那些全局变量调整 PLC 逻辑。
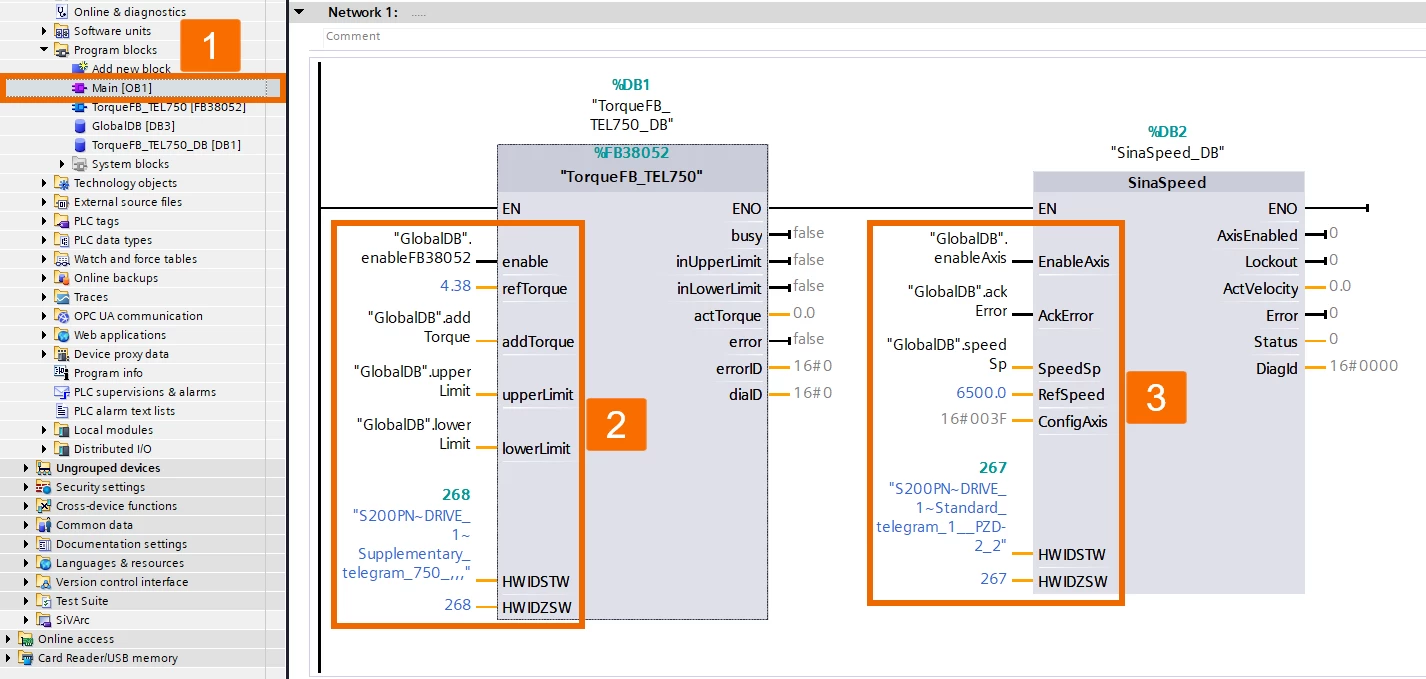
图 3.11:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 通过全局数据块的相关变量配置网络 1 的逻辑
准备好项目进行编译,然后将其下载到 PLC。
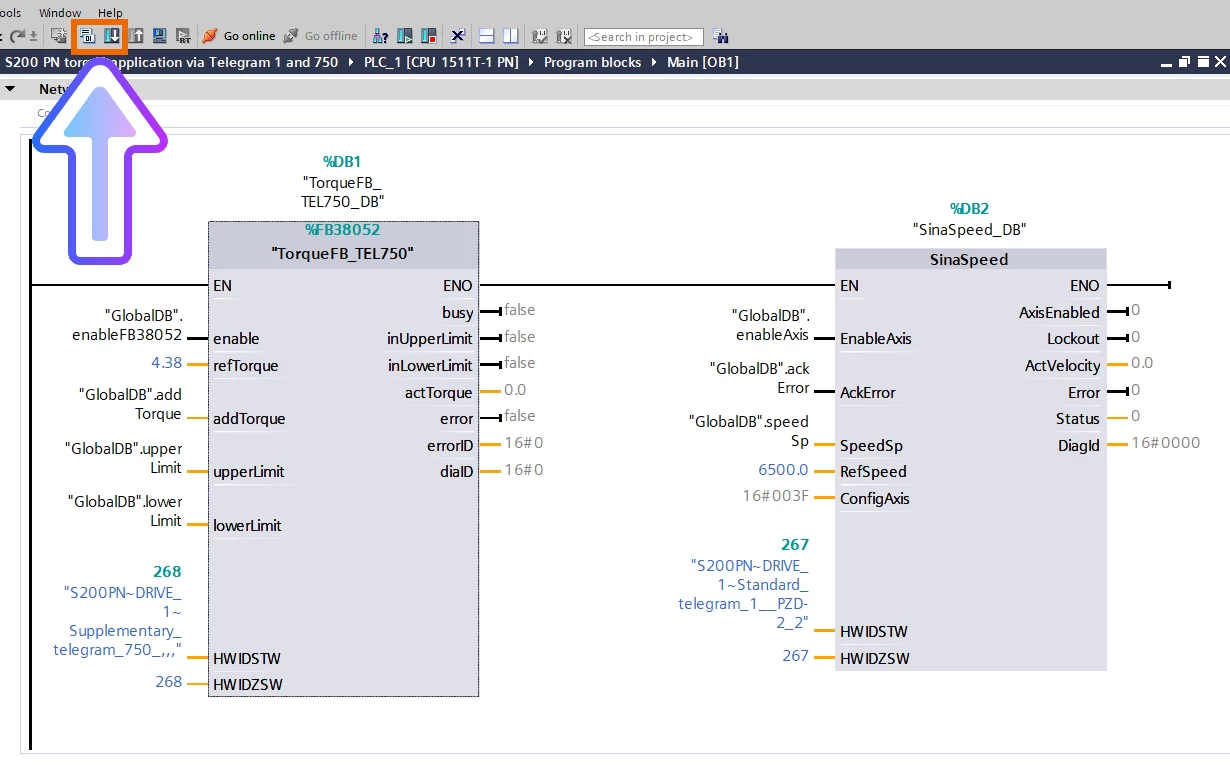
图 3.12:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 编译项目并将其下载到 PLC
让电机旋转一下,看看负载扭矩是否达到 0.02Nm 左右。然后,确保扭矩限制设置为高于负载扭矩。
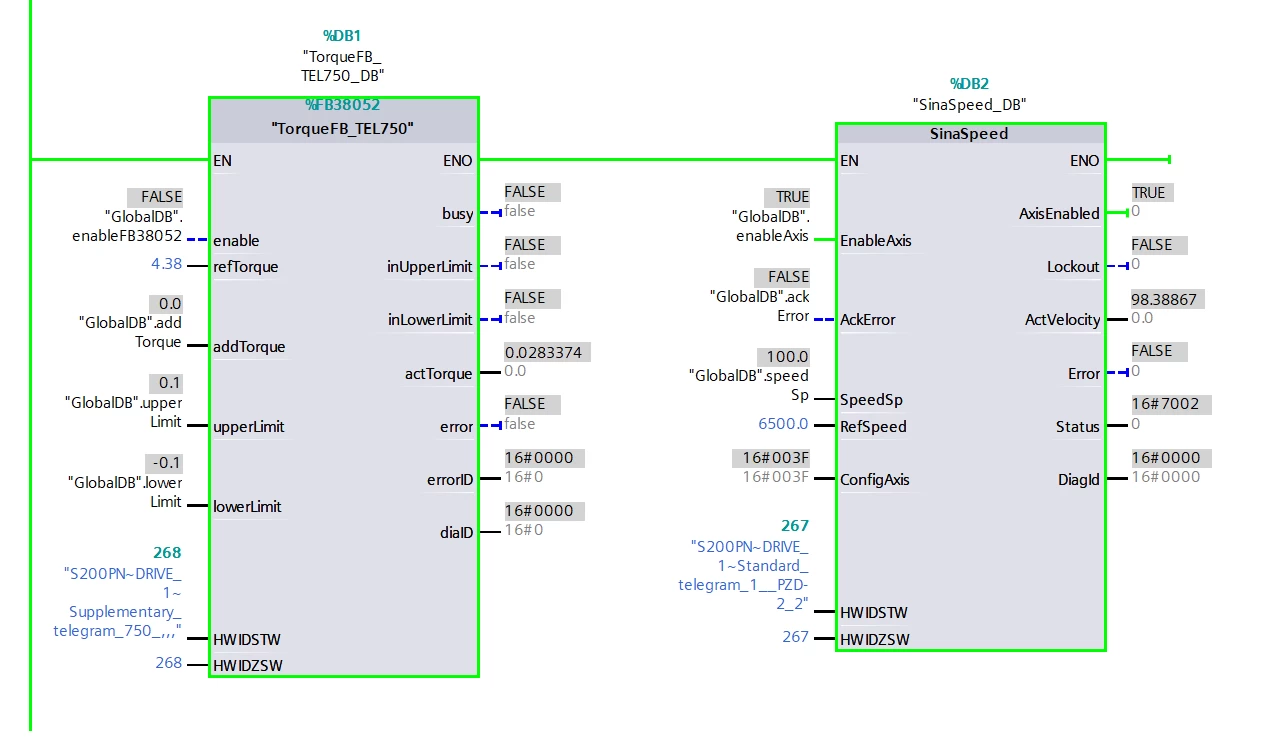
图 3.13:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 让电机旋转
激活功能块。将电机锁定到位,导致速度为 0,并将实际扭矩限制在最高限度。
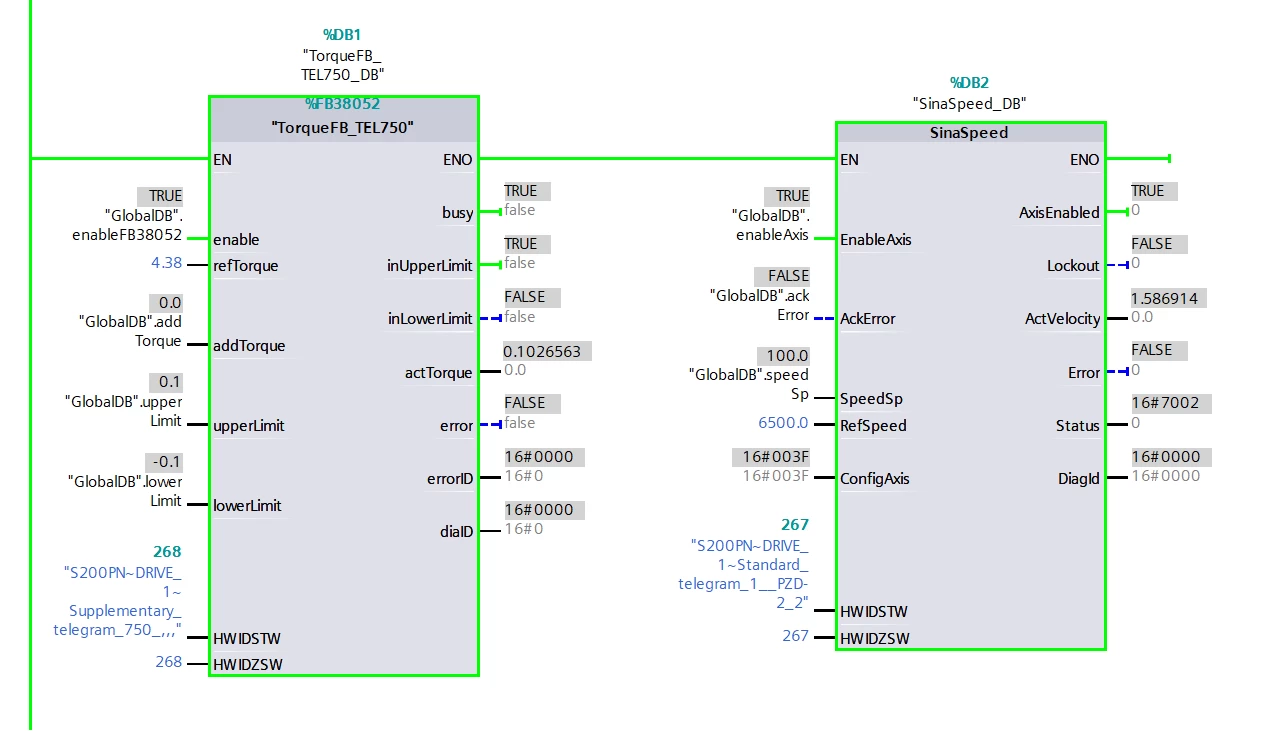
图 3.14:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 停止电机
改变旋转方向,然后锁定电机。结果,速度达到 0,并且扭矩被限制到最小极限。
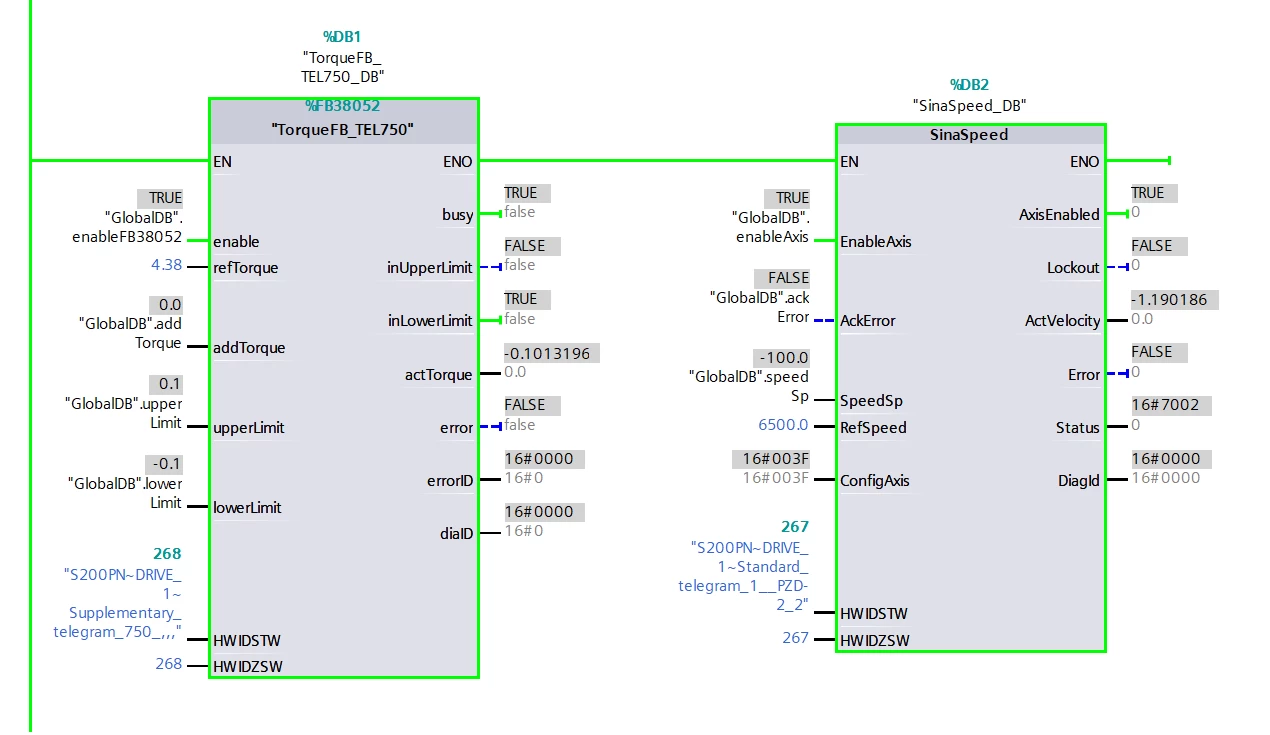
图 3.15:使用功能块向西门子 S200 伺服驱动器施加扭矩 - 改变电机旋转方向
使用技术对象实时施加扭矩
本节以包含速度轴的技术对象为中心,其描述通过 Telegram 3 和 GSDML 文件进行了具体概述。本部分不介绍任何其他报文或技术对象,包括 StartDrive 中的报文或技术对象。然而,它们可以在本申请中引用。现在是时候揭示使用补充 Telegram 750 和标准 Telegram 3 通过 RT(实时)通信配置和操作扭矩应用程序的细节了。
在此方法中,展开子模块文件夹后,将补充 Telegram 750 和标准 Telegram 3 添加到伺服驱动器中。
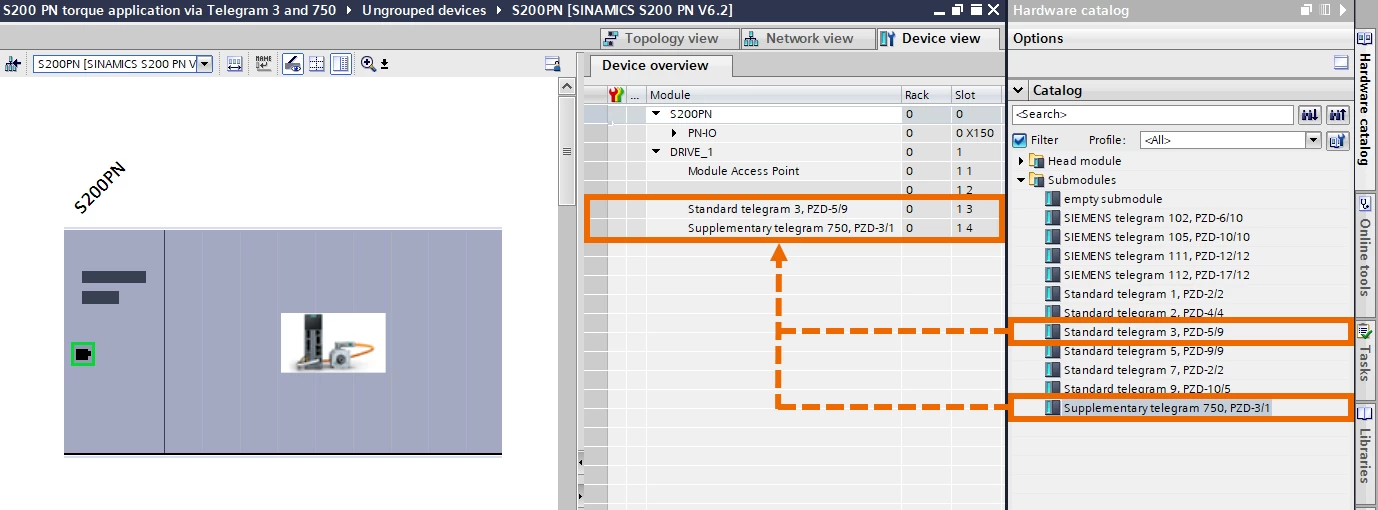
图 4.1:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 将 Telegram 750 和 Telegram 3 放入驱动器中
一旦在 PLC 和伺服驱动器之间建立了 Profinet 连接,就需要将目标工艺对象包含在项目中。为此,请查看项目树,展开技术对象文件夹,然后双击添加新对象将其打开。在运动控制下,您要选择 TO_SpeedAxis,单击“确定”,然后观察此速度轴技术对象成为项目的一部分。
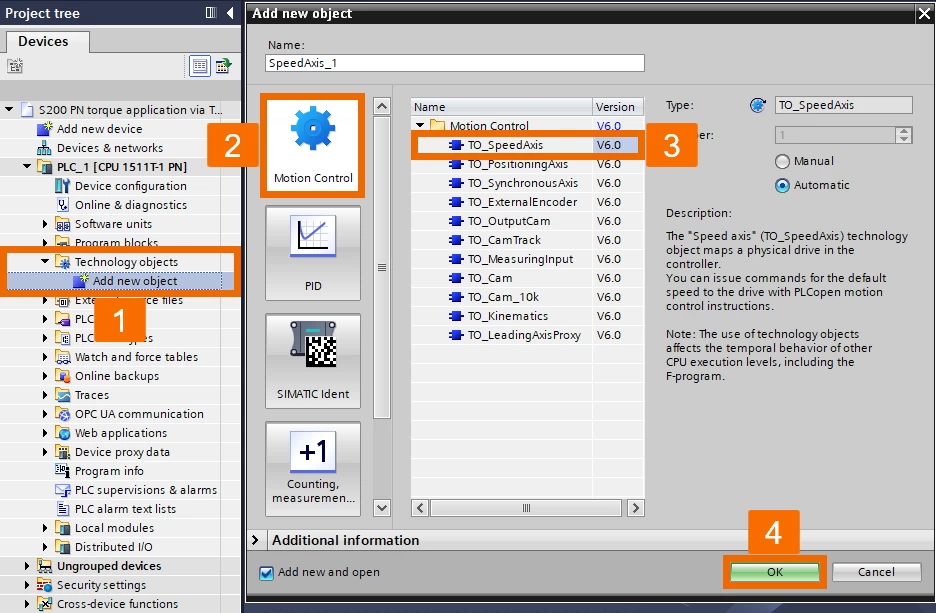
图 4.2:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建速度轴工艺对象
在功能视图中,选择驱动器菜单。按按钮弹出该屏幕。选择您想要的电报。单击“确定”将此数据放入驱动器的属性中。
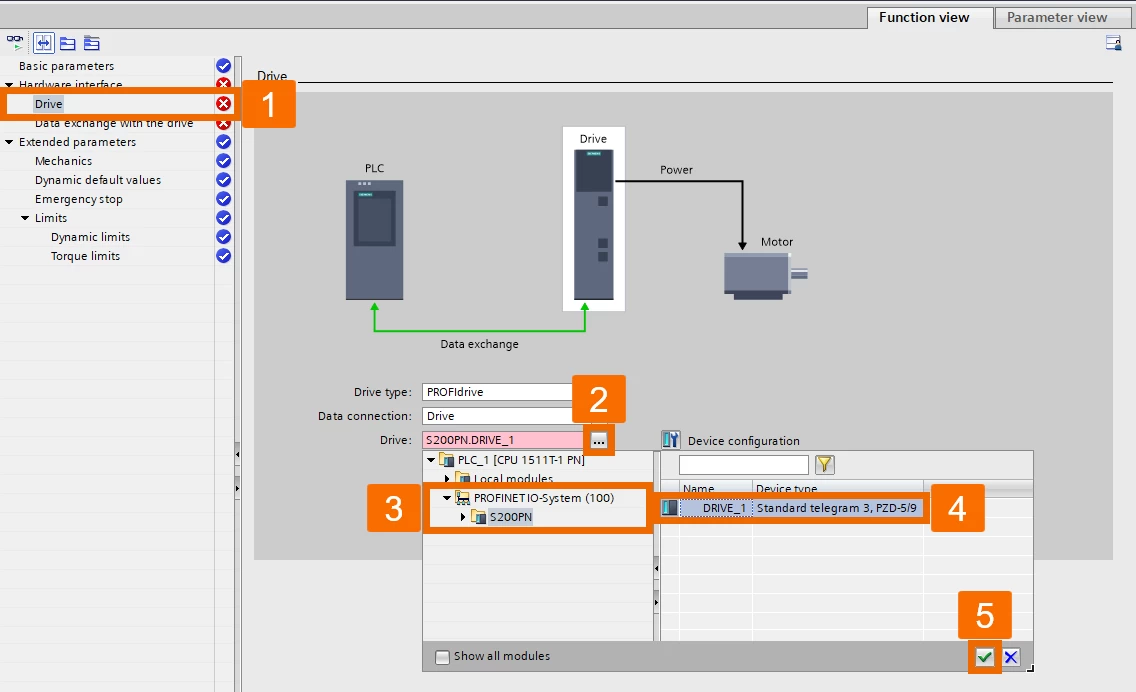
图 4.3:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 配置驱动器菜单设置
选中系统运行(在线)时自动应用驱动值功能的复选框。一旦您正确配置了 Telegram 750,扭矩数据就会自动输入,并且默认情况下,数据连接和其他 Telegram 属性会自动设置。
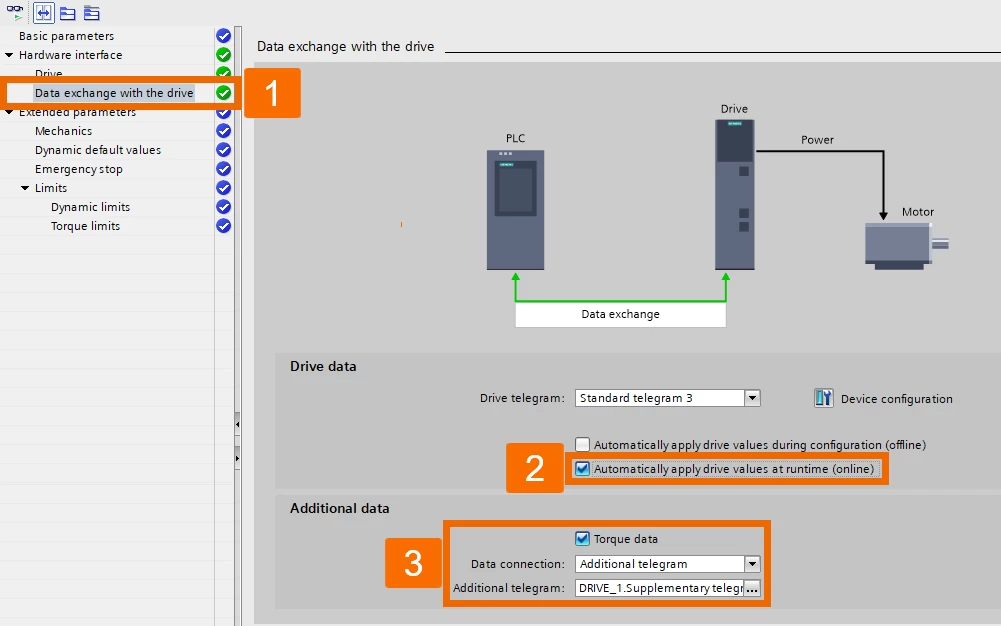
图 4.4:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 组态与驱动器的数据交换
在项目树中的 PLC_1 项下,展开程序块文件夹,然后双击添加新块以生成名为 globalDB 的全局数据块。
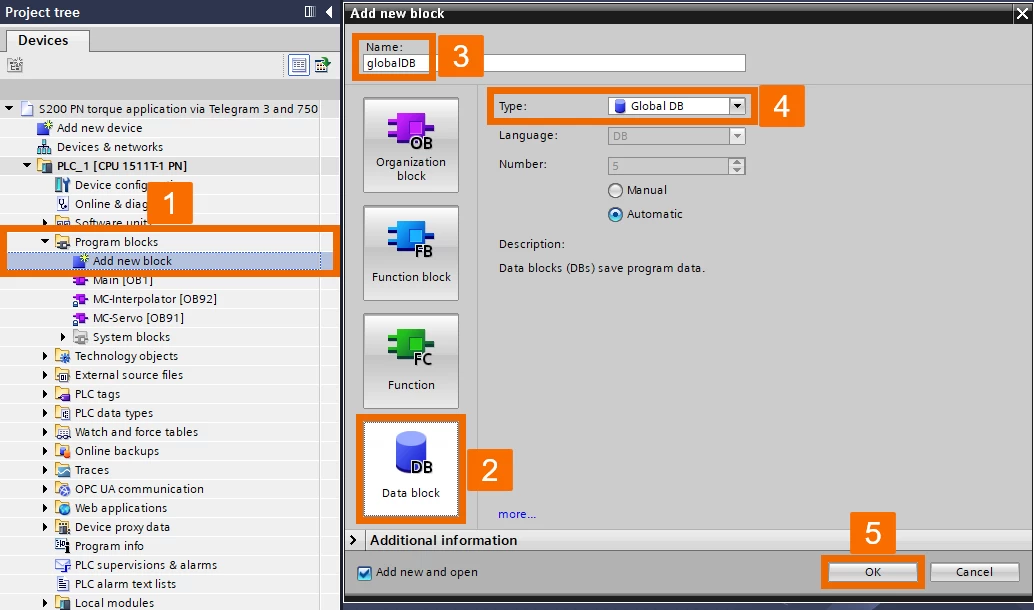
图 4.5:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建全局数据块
当全局数据块窗口打开时,调整相关变量对应的表,如图4.6所示。
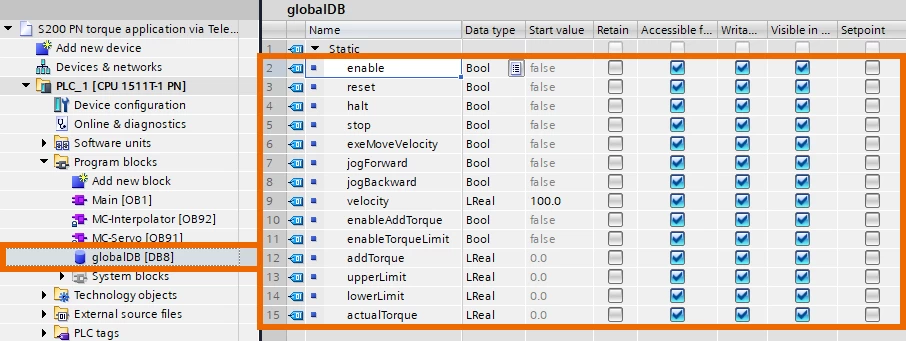
图 4.6:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 生成全局数据块的相关变量
打开主组织块(Main [OB1])并在网络 1、网络 2 和网络 3 中创建一些逻辑,如图 4.7、4.8 和 4.9 所示。确保编译项目,然后启动到 PLC 的下载。
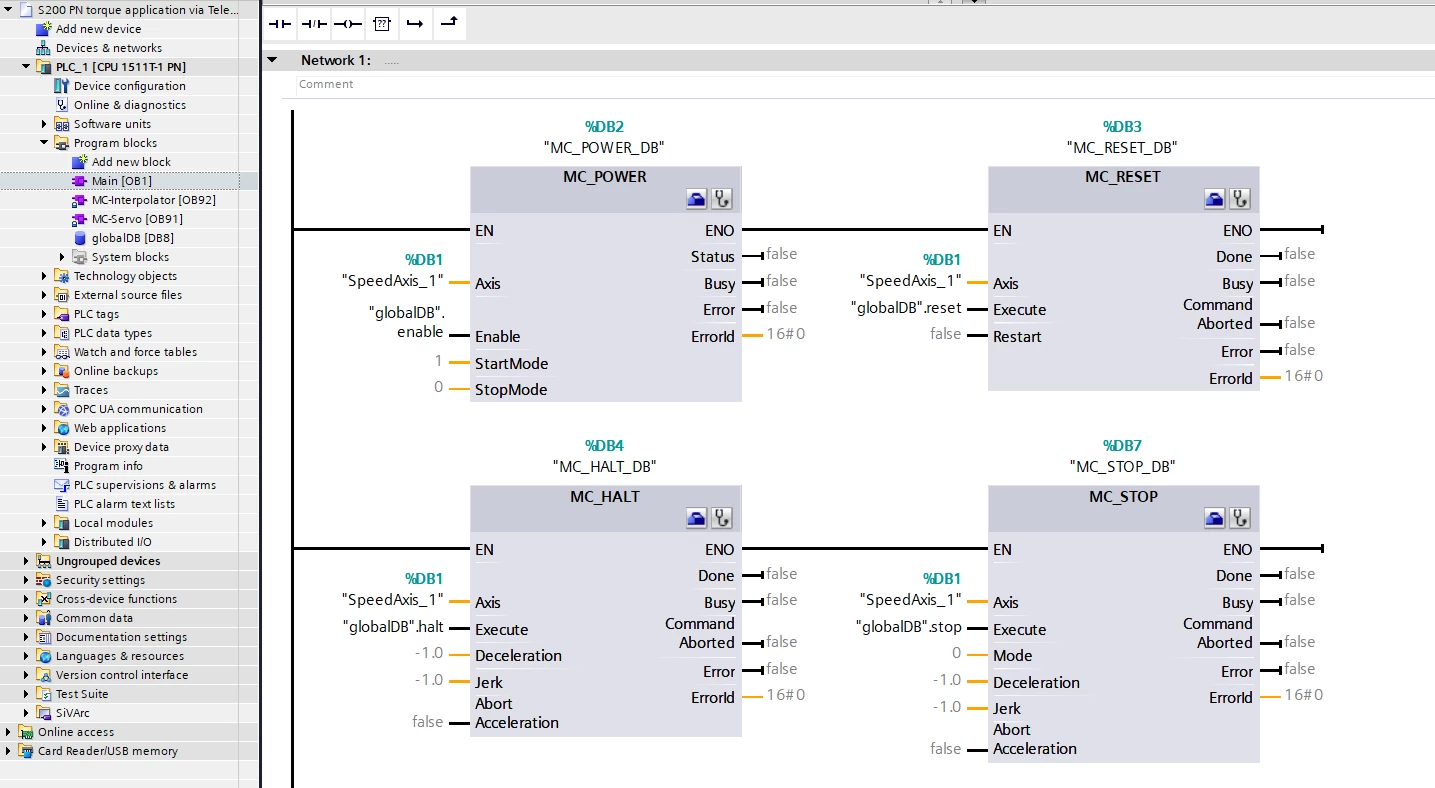
图 4.7:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建网络 1 的逻辑
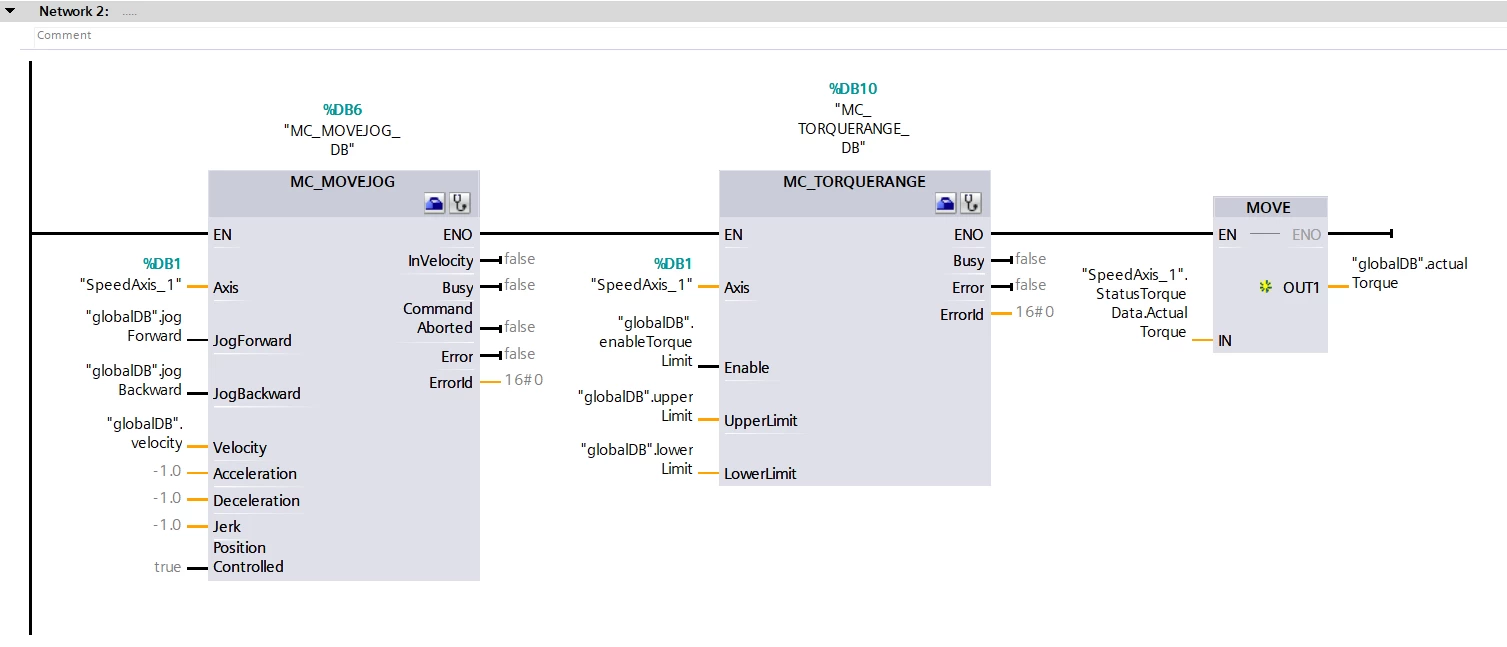
图 4.8:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建网络 2 的逻辑
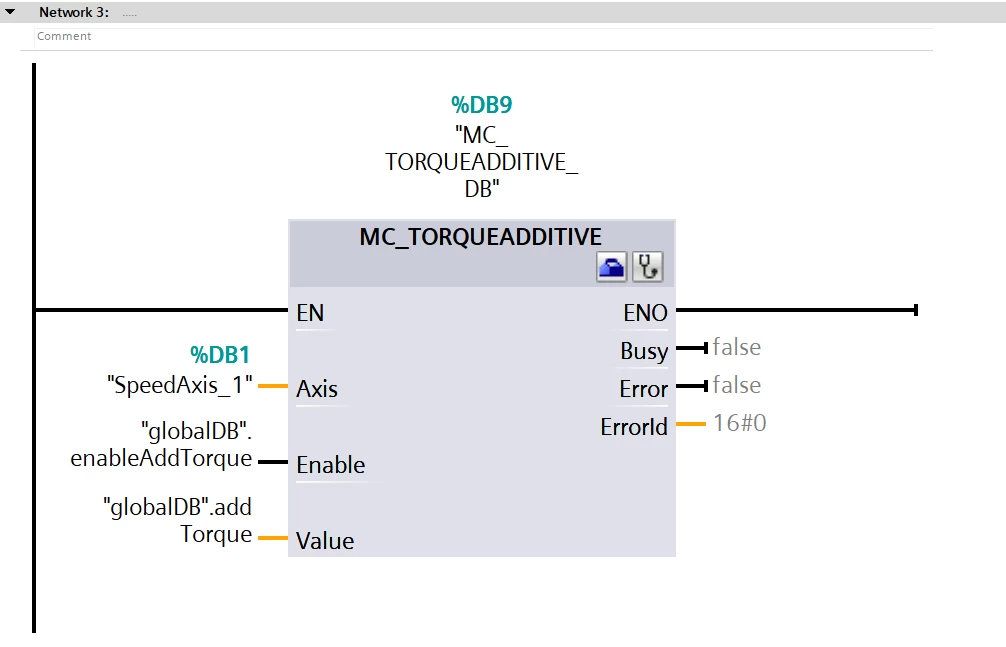
图 4.9:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建网络 3 的逻辑
让电机旋转并确保负载扭矩为 0.02Nm。然后,将扭矩限制调整为高于负载扭矩的值,并激活限制扭矩的块。
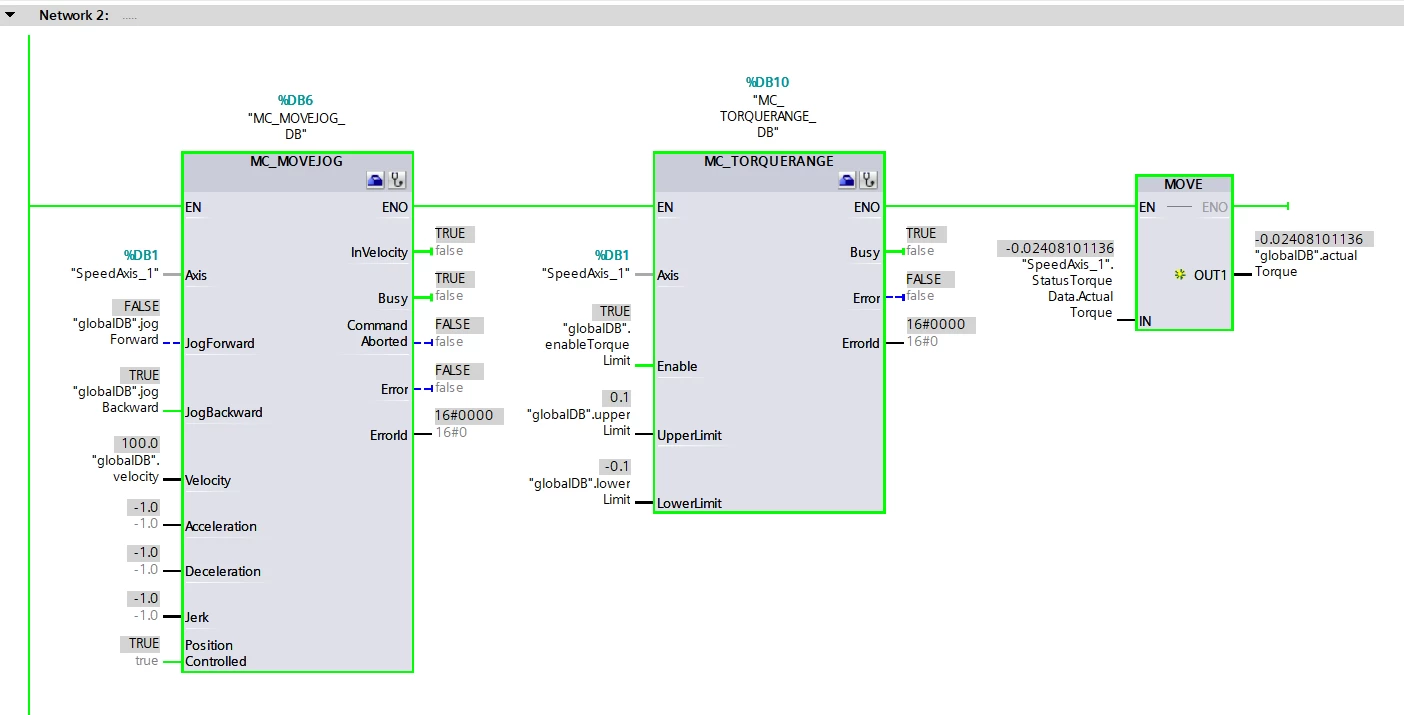
图 4.10:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 让电机旋转
停止电机(防止电机移动),将实际扭矩限制在下限值。
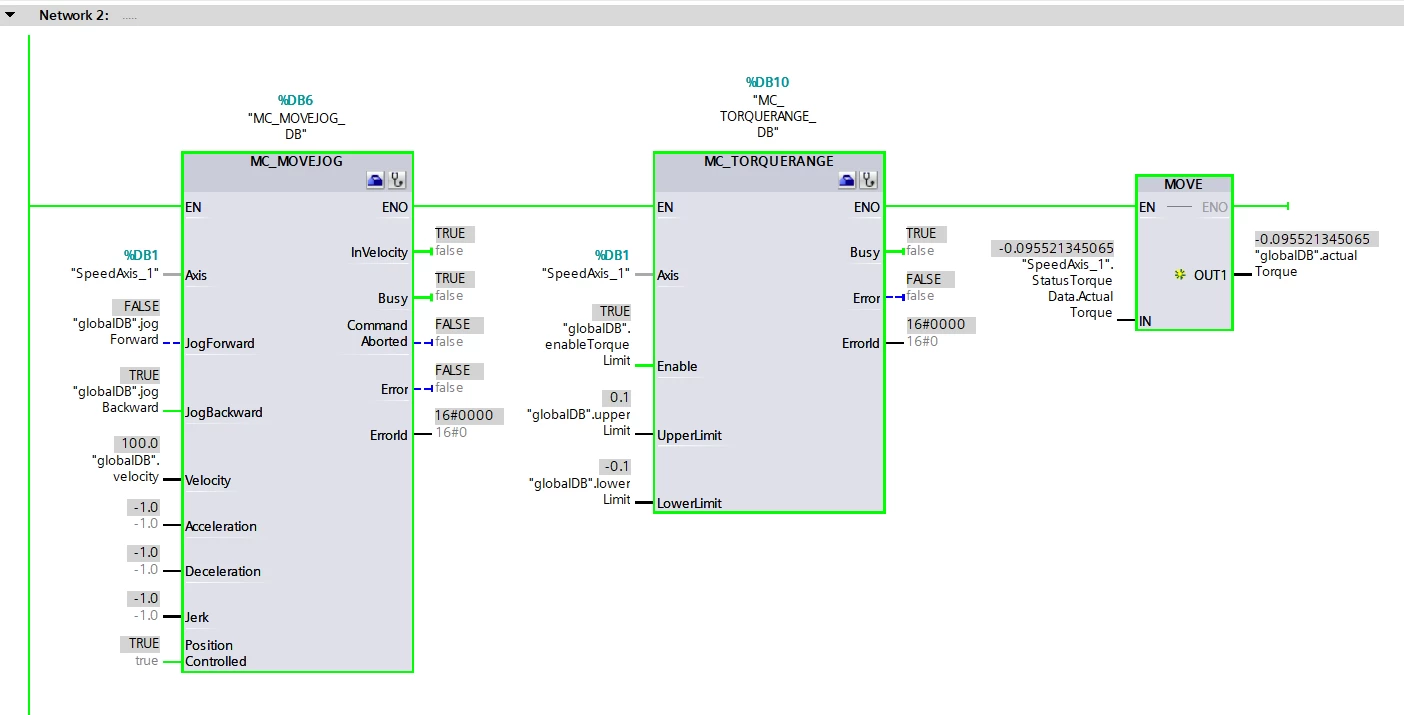
图 4.11:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 停止电机
切换旋转方向并再次停止电机;实际扭矩被限制为最高值。
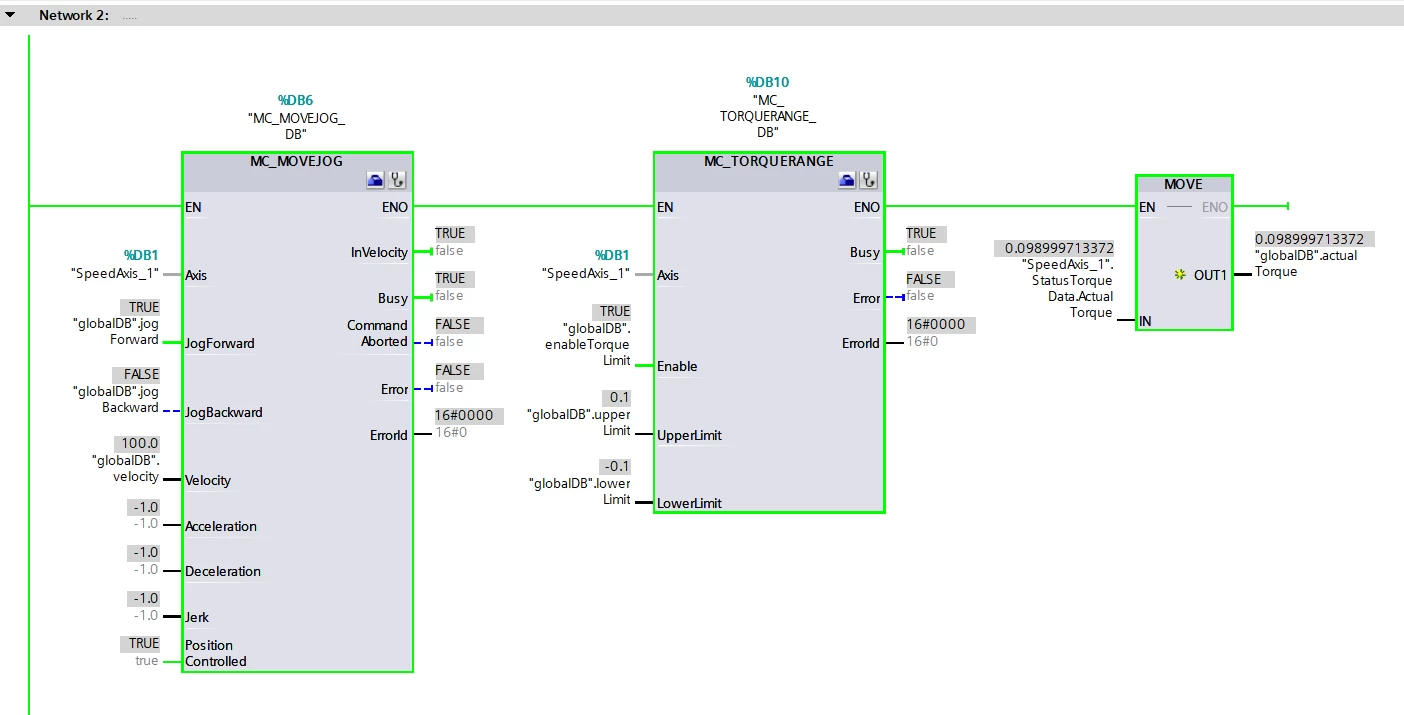
图 4.12:使用速度轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 改变电机旋转方向
使用等时实时工艺对象施加扭矩
本节以包含位置轴的技术对象为中心,其描述通过 Telegram 105 和 GSDML 文件进行了具体概述。现在是时候通过 IRT(等时实时)通信使用补充 Telegram 750 和标准 Telegram 105 来揭示配置和操作扭矩应用程序的细节。在此技术中,展开子模块文件夹后,将补充 Telegram 750 和标准 Telegram 105 添加到伺服驱动器中。
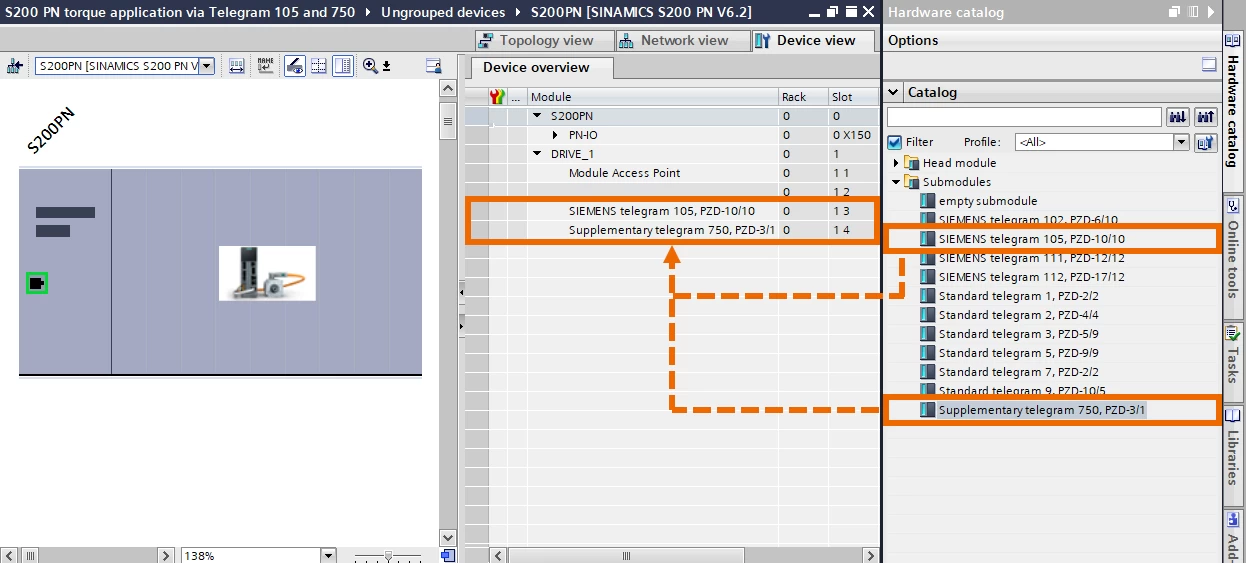
图 5.1:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 将 Telegram 750 和 Telegram 105 放入驱动器中
切换到拓扑视图并使用实际连接自定义拓扑。
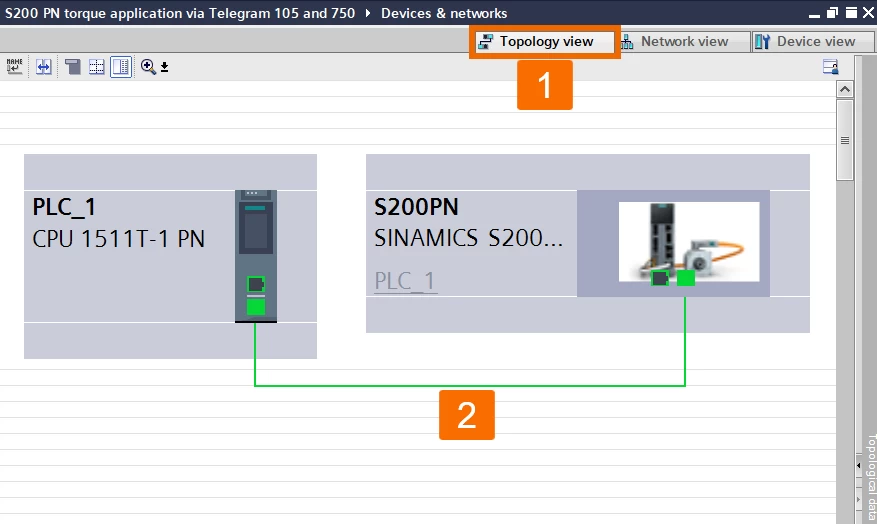
图 5.2:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 使用实际连接来配置拓扑
展开左侧窗格中项目树中的技术对象文件夹,然后双击添加新对象将其打开。在运动控制下,您要选择 TO_PositioningAxis,单击“确定”,然后观察该位置轴技术对象成为项目的一部分。
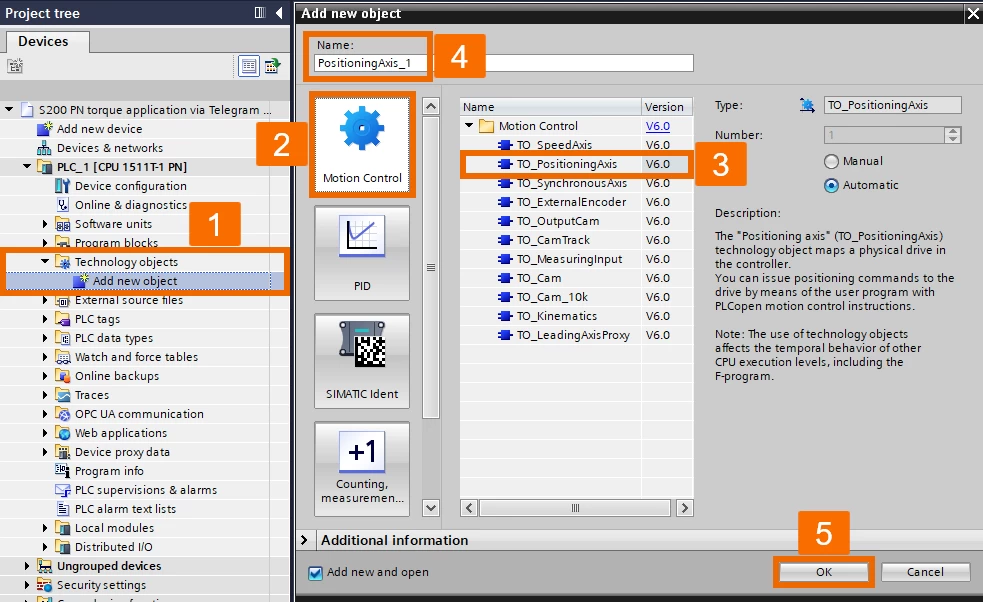
图 5.3:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建位置轴工艺对象
安排 Drive 菜单以合并西门子 Telegram 105。
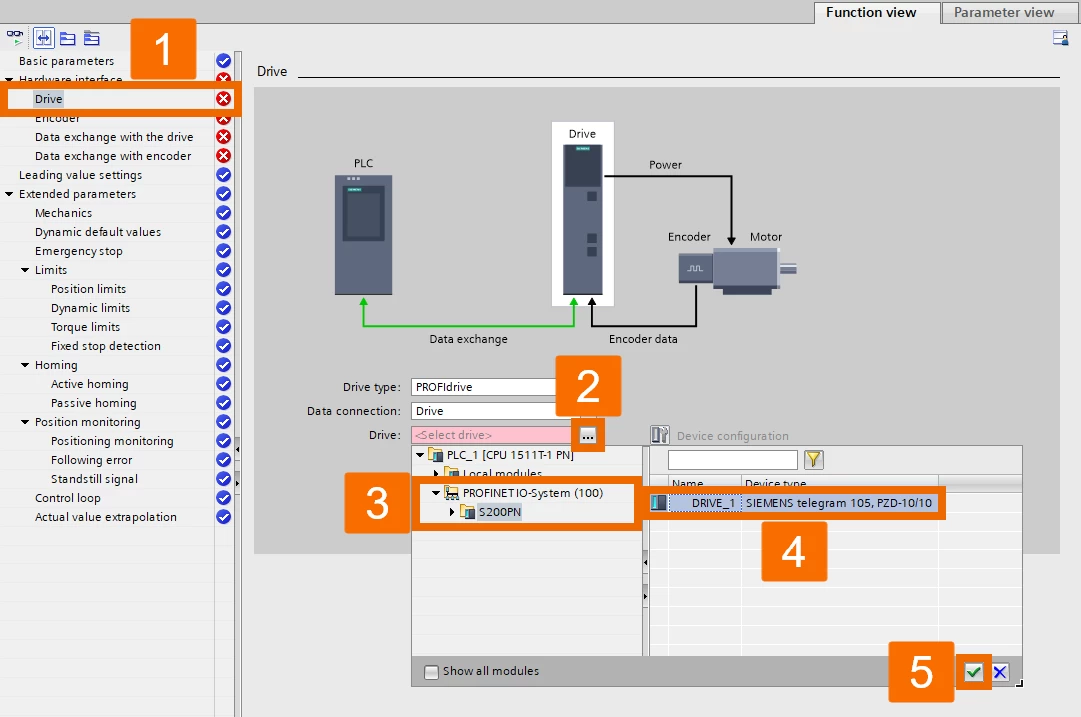
图 5.4:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 配置驱动器菜单设置
配置与驱动器功能进行数据交换的设置时,启用在系统运行(在线)时自动应用驱动器值的功能,以自动检索驱动器数据。当在伺服驱动器中正确配置 Telegram 750 时,附加数据将自动更新为扭矩详细信息。
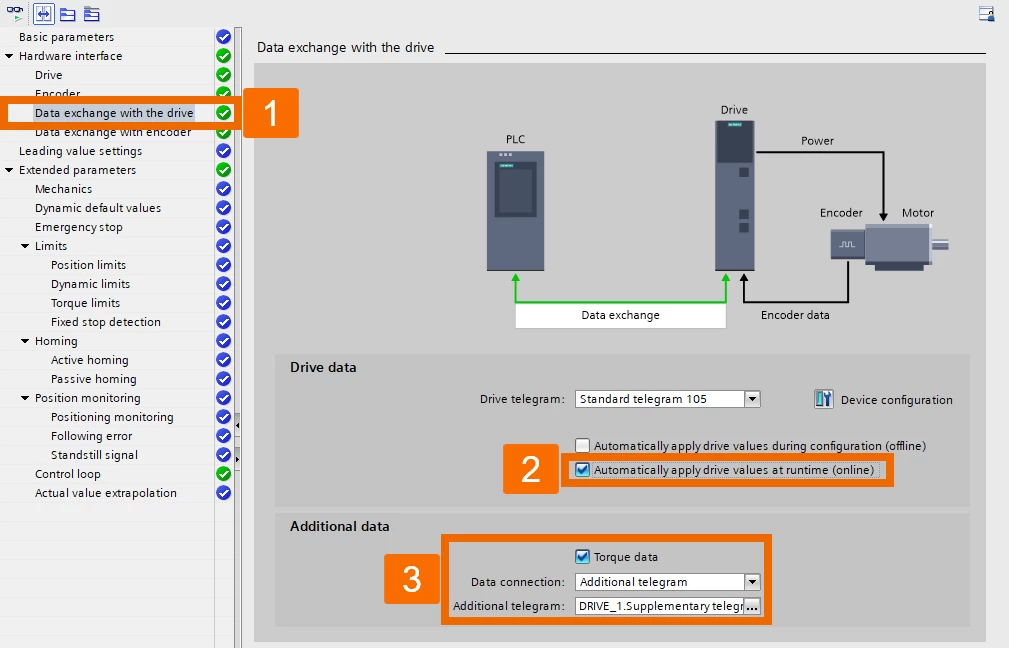
图 5.5:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 组态与驱动器的数据交换
在“与编码器进行数据交换”菜单中,选中在运行(在线)时自动应用编码器值的选项的复选框。
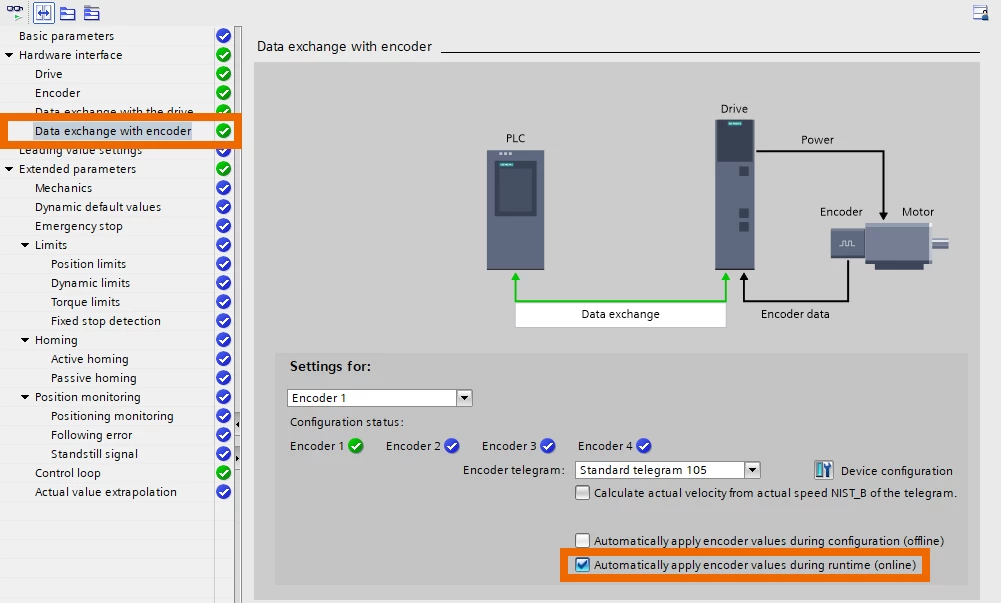
图 5.6:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 组态与编码器的数据交换
关闭错误监控功能,这样您在使用扭矩限制功能进行定位时就不必处理恼人的错误警报。或者,设置适当的值来测试扭矩限制功能。
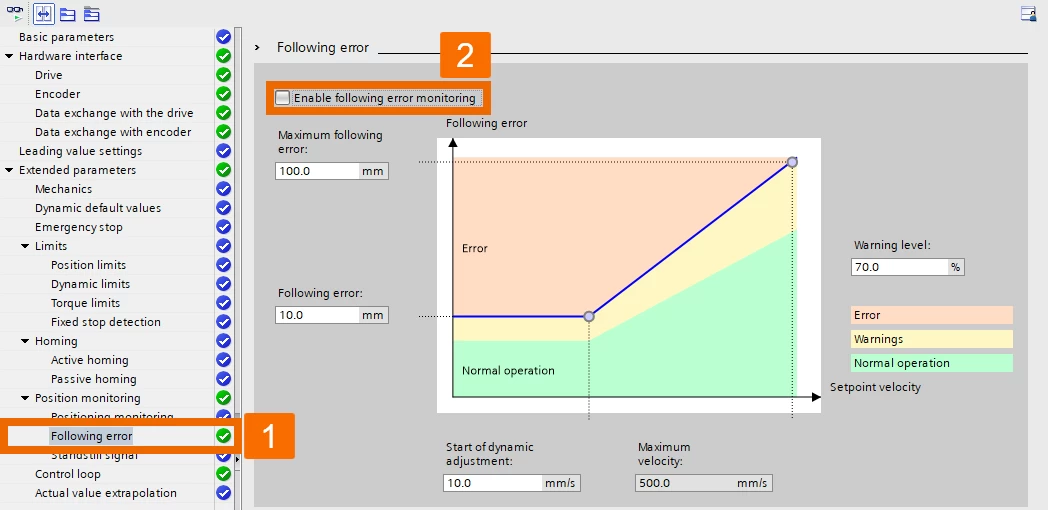
图 5.7:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 禁用错误监控功能
切换到设备视图。选择S200伺服驱动器。选择补充 Telegram 750。然后,导航至检查器窗口中的“属性”以启用等时模式。
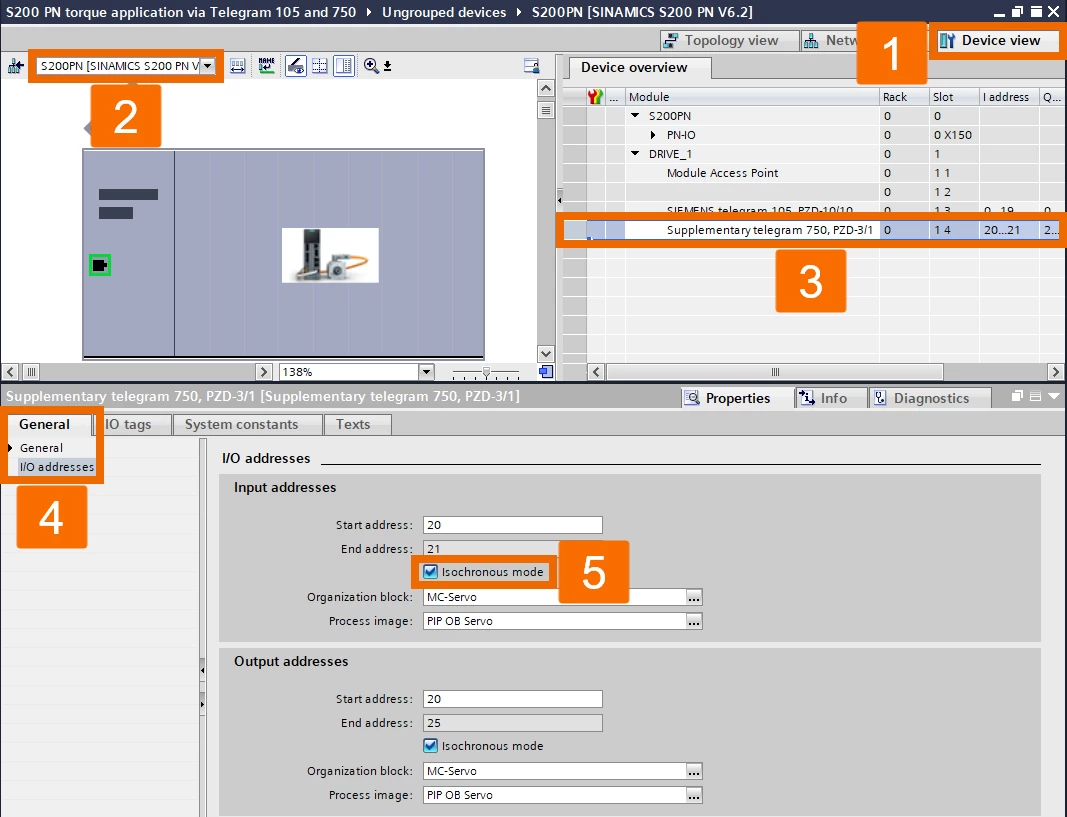
图 5.8:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 为 Telegram 750 启用等时同步模式
跳到网络视图并选择 PN/IE_1。在“常规”选项卡下,导航“域管理”->“同步域”->“Sync-Domain_1”以到达“设备”项。从那里,调整属性以将 RT 类切换为 IRT 通信。
图 5.9:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 为 S200 伺服驱动器配置 IRT 通信
在Programblocks文件夹下,生成一个全局数据块,并调整相关变量对应的表,如图5.10所示。
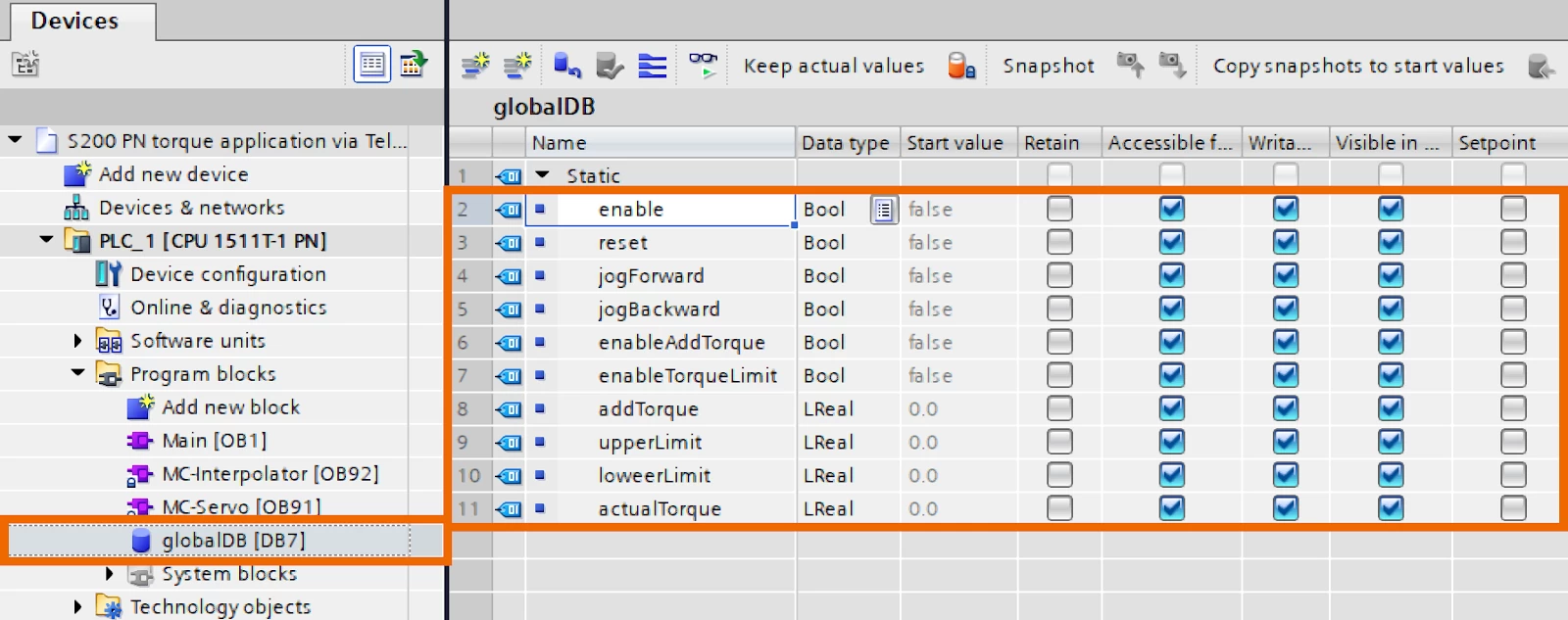
图 5.10:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 为全局数据块创建相关变量
打开主要组织块并在网络1、网络2和网络3中创建一些逻辑,如图5.11、5.12和5.13所示。确保编译项目,然后启动到 PLC 的下载。
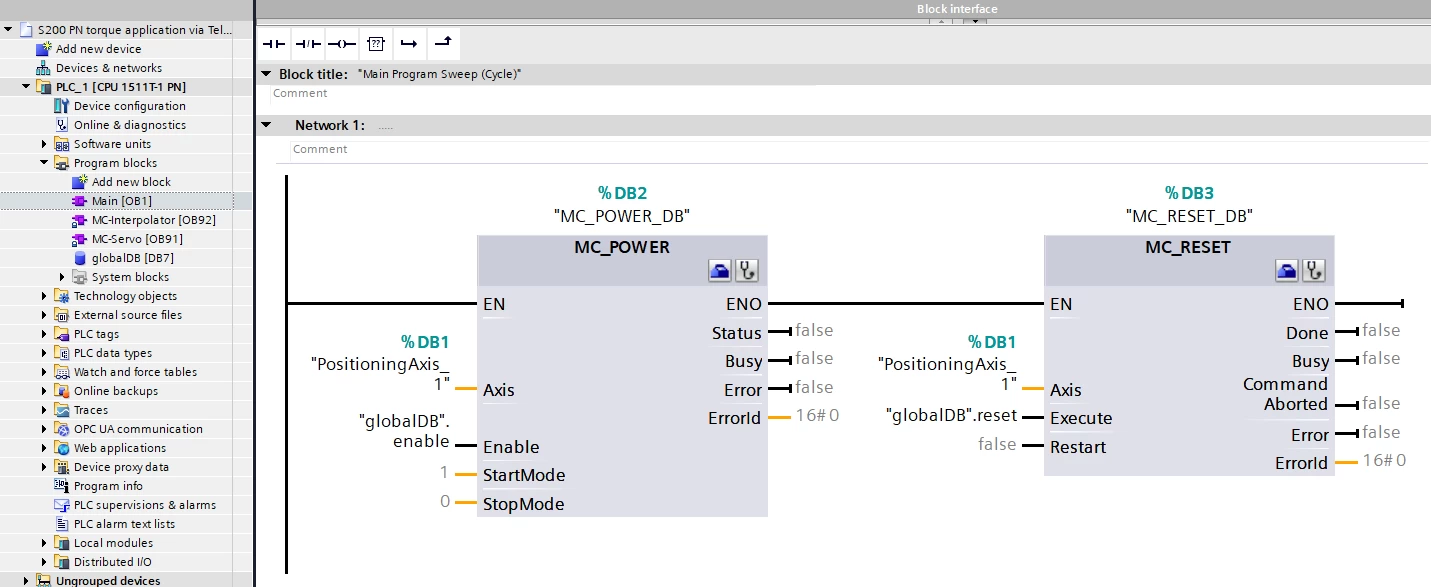
图 5.11:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建网络 1 的逻辑
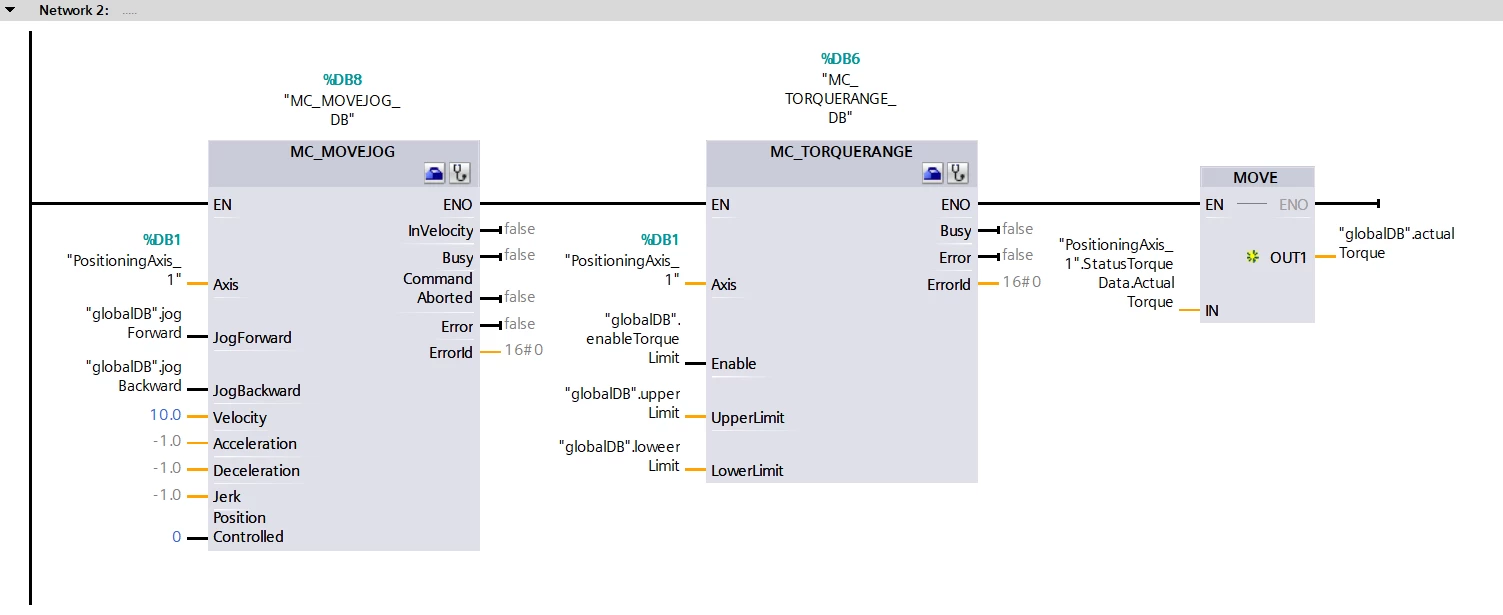
图 5.12:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建网络 2 的逻辑
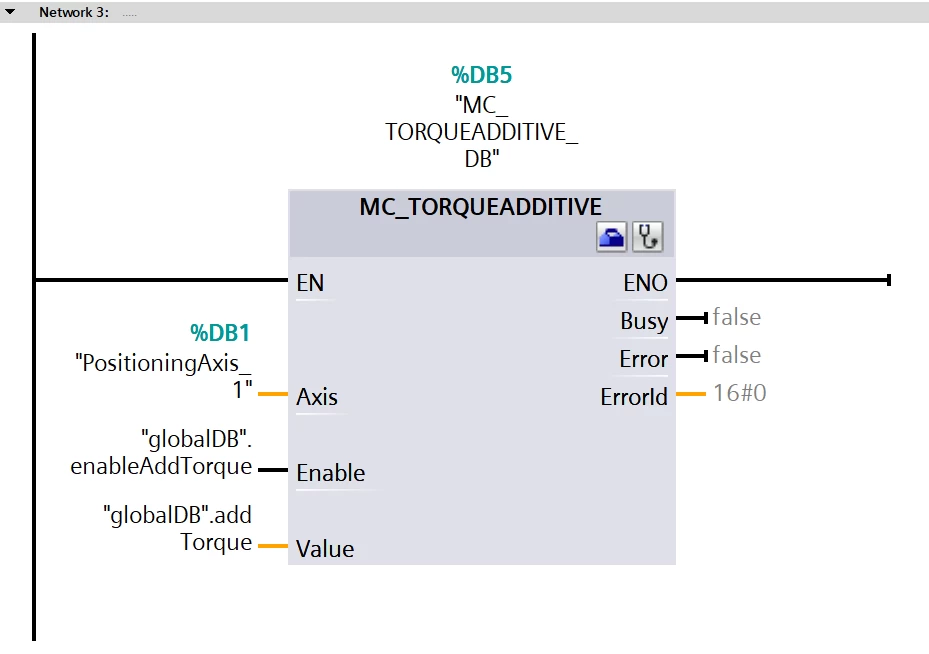
图 5.13:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 创建网络 3 的逻辑
让电机旋转并确保负载扭矩为 0.02Nm。
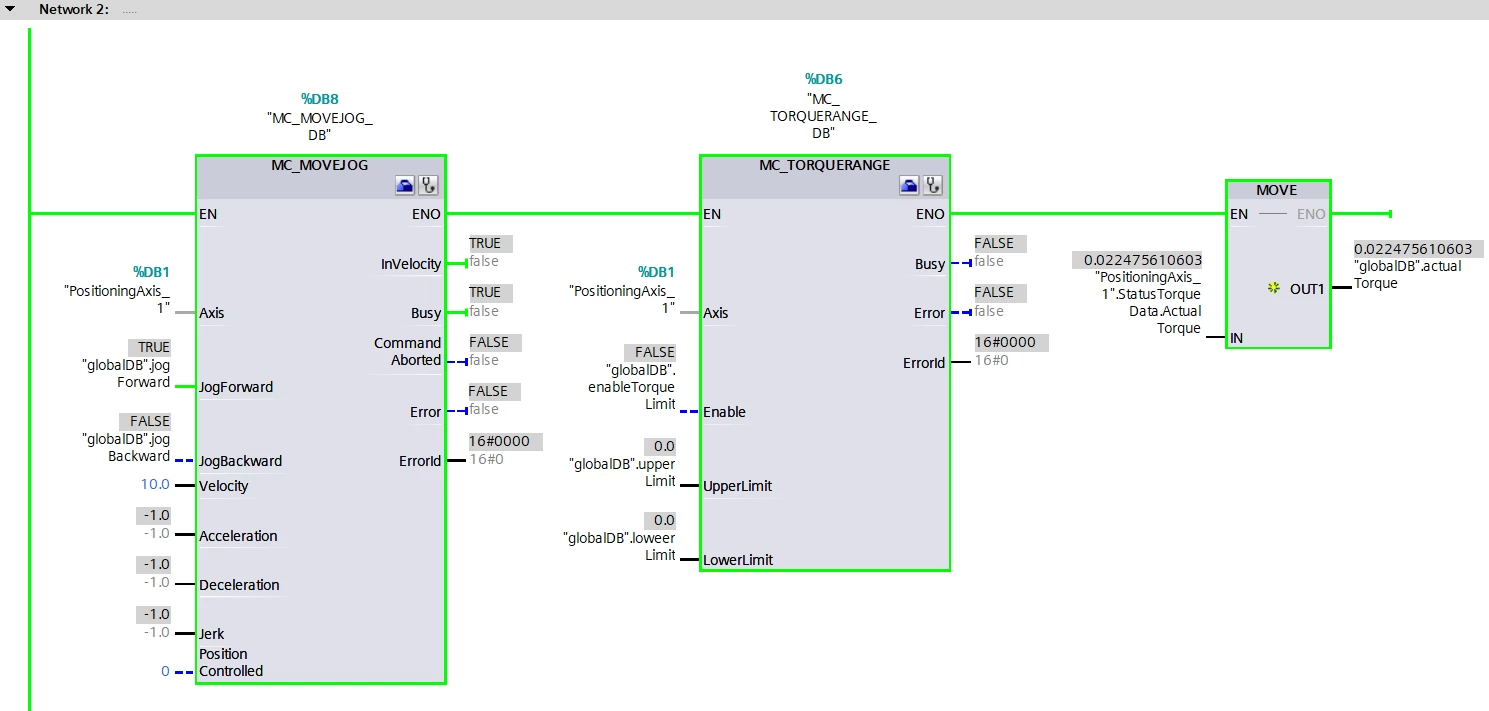
图 5.14:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 让电机旋转
将扭矩限制提高到负载扭矩以上并激活扭矩限制功能。使电机停止并验证实际速度是否为 0,同时确保实际扭矩限制在上限值。
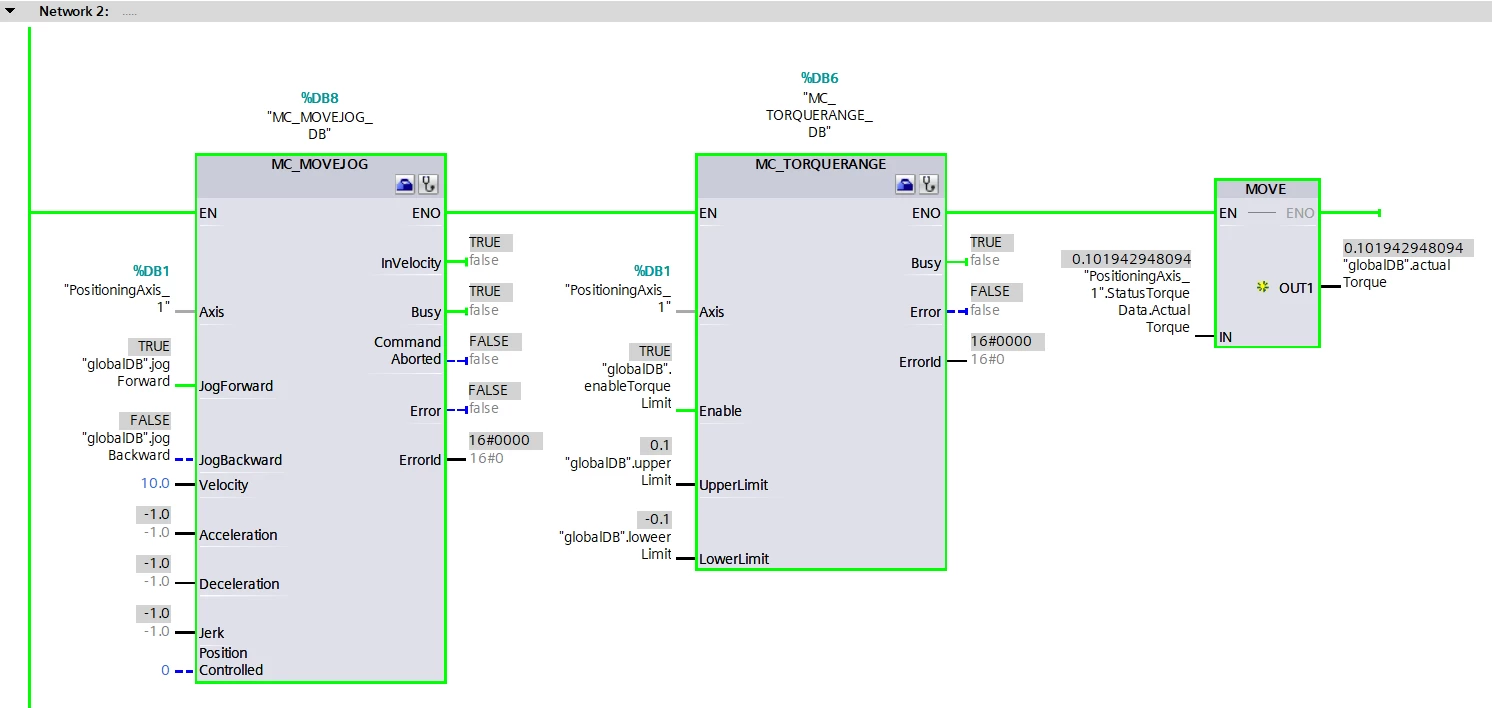
图 5.15:使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 停止电机
切换旋转方向并再次停止电机。验证实际速度是否为 0,并且实际扭矩被限制为最低值。
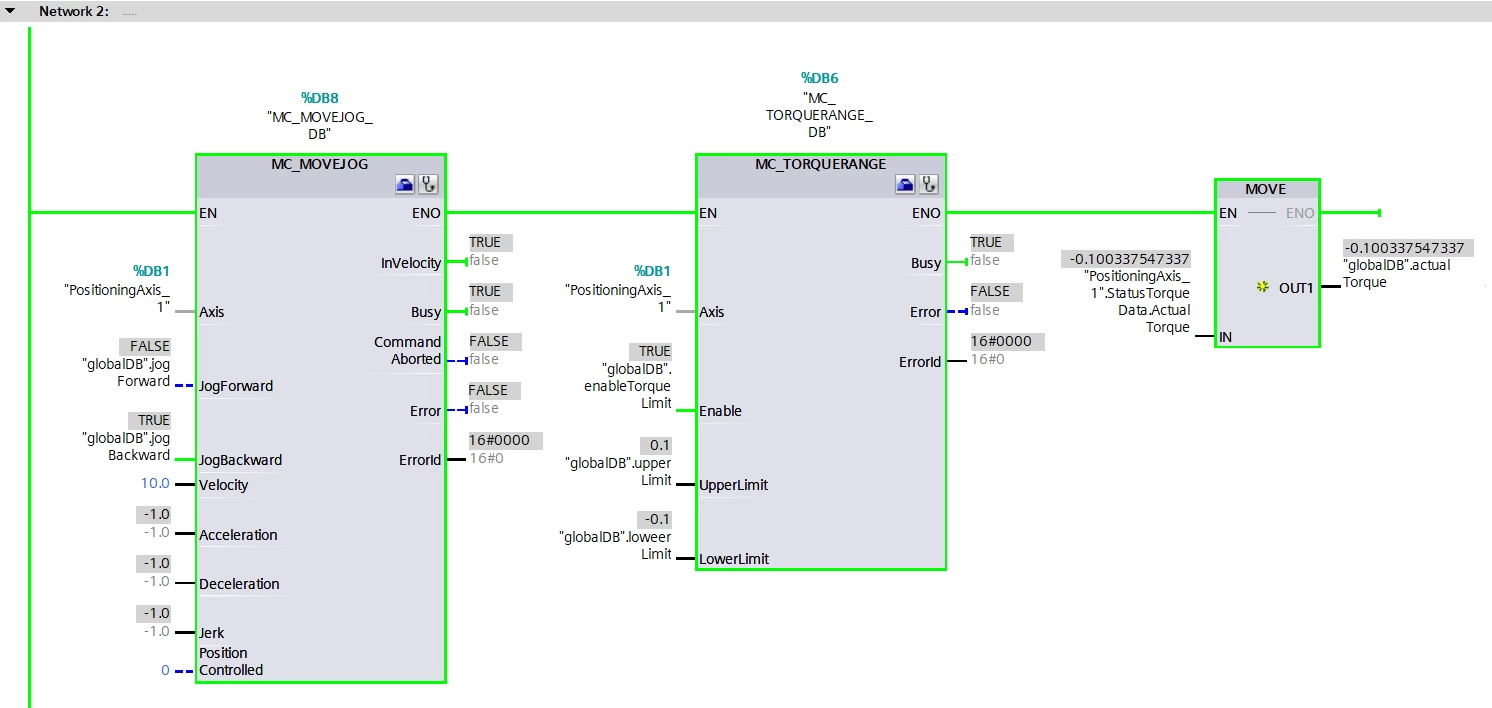
图 5.16: 使用位置轴工艺对象向西门子 S200 伺服驱动器施加扭矩 - 改变电机旋转方向
结论
总之,您了解了 Telegram 750 的基本见解,并且了解了通过集成 FB38052,您可以循环控制 S200 伺服驱动器。最后,您了解了如何使用工艺对象(速度和位置)实时和等时实时地向西门子 S200 伺服驱动器施加扭矩。