使用 TIA Portal 进行西门子伺服驱动器的速度和位置控制
介绍
SIMATIC S7-1500 PLC 可与 SINAMICS S200 PN 伺服驱动系统无缝集成,提供无与伦比的性能,为用户提供精确的位置和速度控制能力,这对于在工业自动化中实现卓越的运动控制至关重要。
在本教程中,您将通过 SinaSpeed 功能块深入研究速度控制的复杂性,并了解使用工艺对象实现精确位置控制的详细说明。
图 1.1 提供了概述自动化任务的视觉表示,全面概述了其结构和组件。
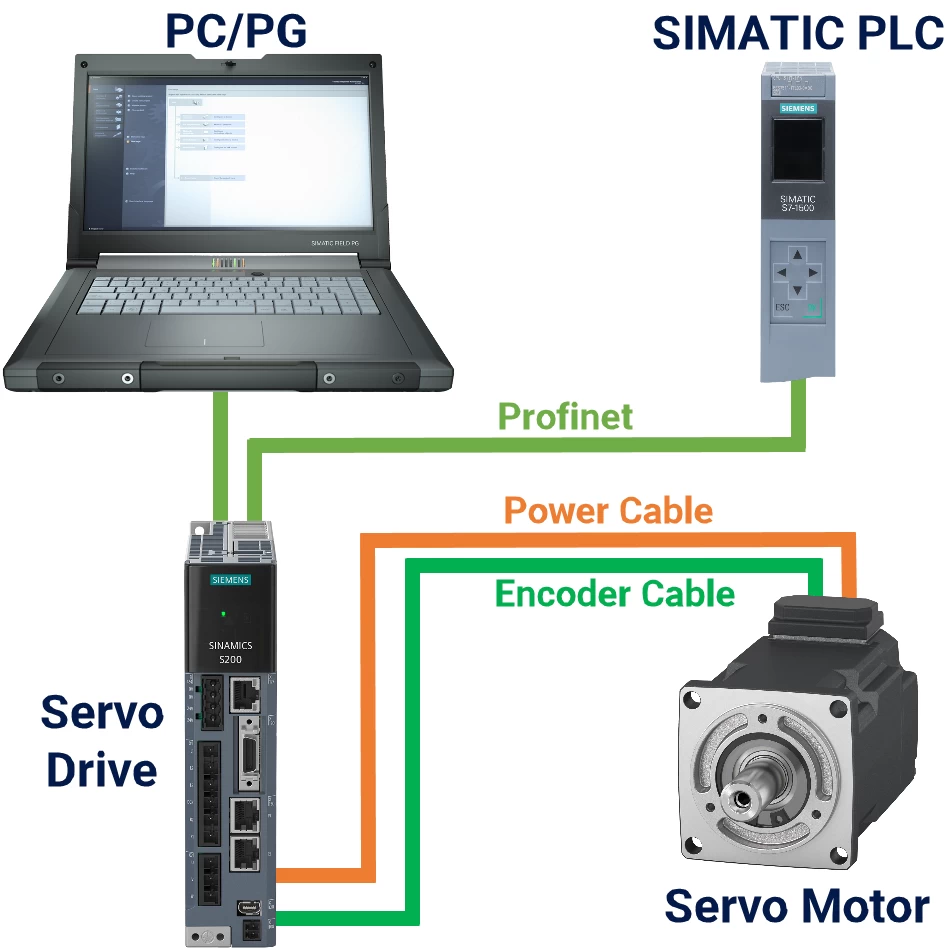
图 1.1:西门子伺服驱动器速度和位置控制 - 自动化任务概述
先决条件
您需要遵循本教程:
- 您需要在个人计算机上安装 TIA Portal 软件。尽管本教程涉及版本 18,但请放心,其他版本的 TIA Portal 也可以正常工作。
- 您需要熟悉如何在 TIA Portal 中安装所需伺服驱动器的GSDML 文件。
- 您应该了解如何将 PLC 和伺服驱动器硬件添加到项目中。
- 您需要安装SINAMICS StartDrive 版本 18 SP2。
伺服驱动器速度控制:硬件设置
本教程部分介绍硬件配置。在这里,我们向您提供详细的说明,以确保成功实施。
首先,启动 TIA Portal 软件,从头开始创建一个项目,并将所需的 CPU(例如 CPU 1511T-1 PN)集成到该项目中以进行进一步开发。

图 2.1:西门子伺服驱动器速度控制 - 将 PLC 添加到项目中
双击项目树中的“添加新设备”项以打开弹出屏幕。在屏幕中,选择“驱动器”类别,然后从提供的“驱动器和启动器”列表中找到所需的 S200 驱动器。找到后,确保固件版本准确,然后继续将设备名称修改为“S200 PN”。然后,按“确定”按钮将驱动器合并到 TIA 项目中。
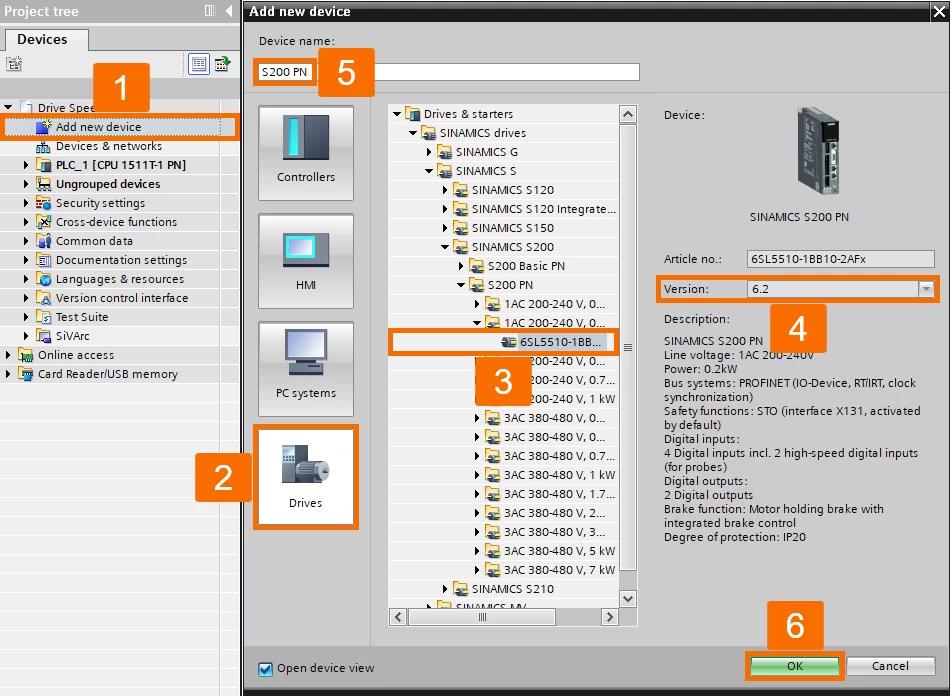
图 2.2:西门子伺服驱动器速度控制 - 将所需的驱动器添加到项目中
忽略此应用程序中的安全设置,而是选择“继续使用低安全设置”选项以绕过任何限制。出现“警告”窗口后,按“确定”按钮继续。
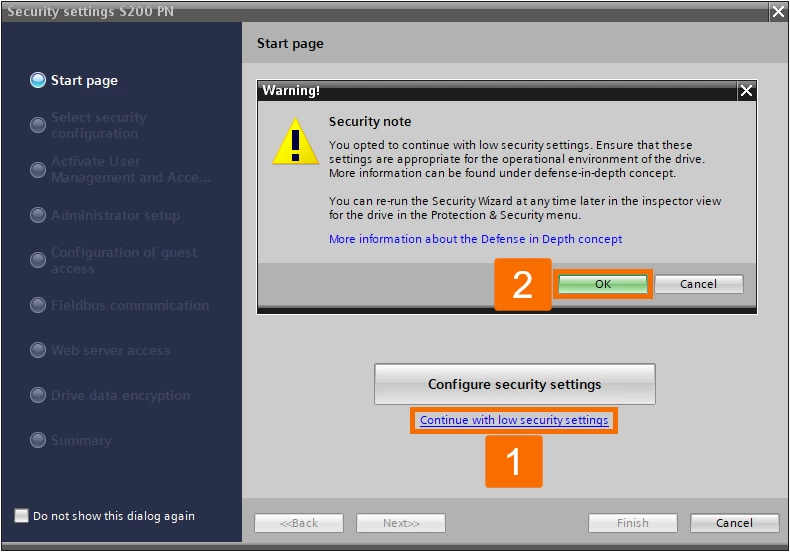
图 2.3:西门子伺服驱动器速度控制 - 配置驱动器的低安全设置
最后,在安全设置窗口的“摘要”部分中,按“完成”按钮完成该过程。

图 2.4:西门子伺服驱动器速度控制 - 最终确定驱动器的安全设置
显示伺服驱动器“设备配置”窗口后,导航至“设备视图”屏幕。从那里,查找最近添加的“S200 PN”驱动器并选择它。单击“MOT”选项,然后单击“检查器”窗口中的“属性”,然后选择“Motor-selection-1FL2”项。通过将目标值输入“额定功率”过滤器来指定所需功率,或考虑使用替代过滤器进行定制。使用滚动条滚动浏览可用电机,直到找到所需的电机,然后继续进行选择。
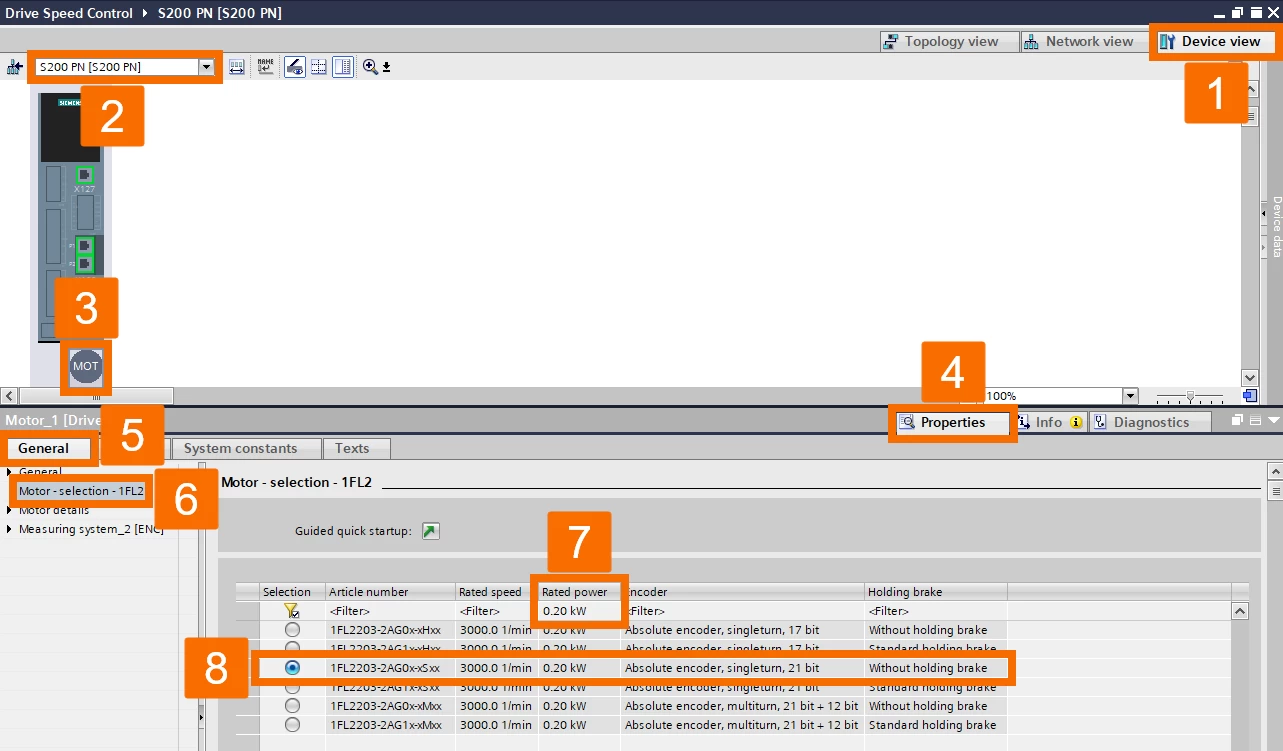
图 2.5:西门子伺服驱动器速度控制 - 选择所需电机
单击伺服驱动器的 PROFINET 接口。然后,在检查器窗口的“常规”选项卡下,浏览“高级选项”以查找并选择“等时模式”。最后,取消选中“等时模式”的选择。
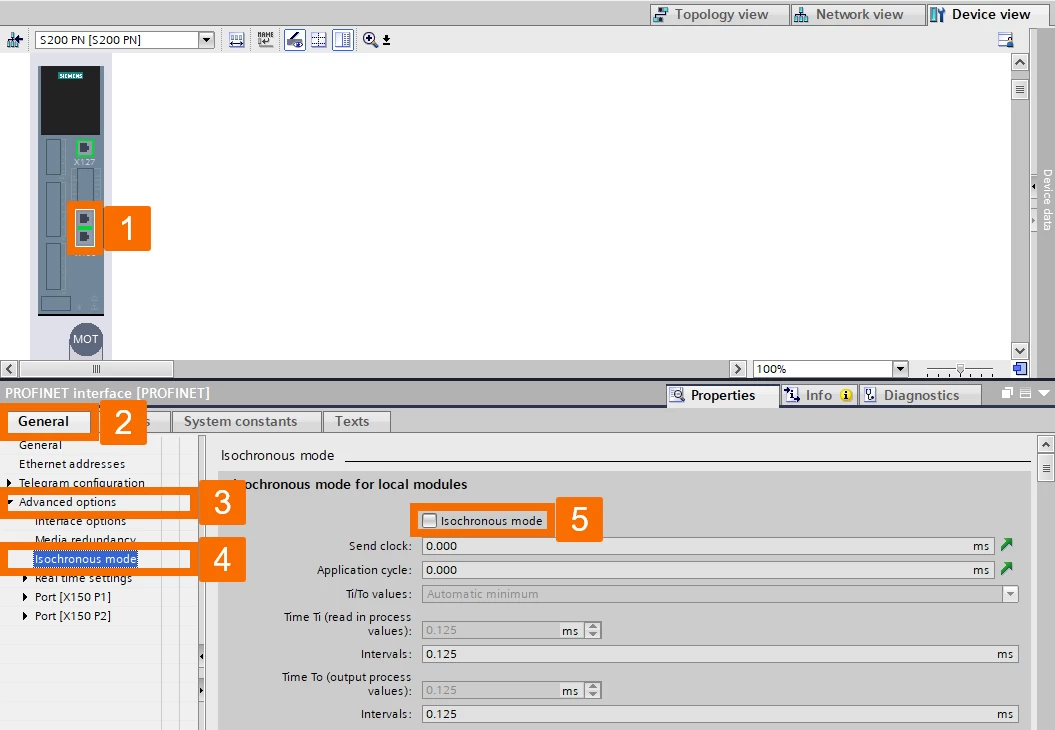
图 2.6:西门子伺服驱动器速度控制 - 禁用等时同步模式
双击“引导式快速启动”即可触发快速启动向导,让您立即访问智能设计的界面,该界面将系统地指导您完成快速启动过程的每个阶段。通过将运动控制的职责从 PLC 分配给驱动器,您可以激活所需的运动控制功能。

图 2.7:西门子伺服驱动器速度控制 - 访问引导式快速启动
选择“速度控制”选项。这样,您就可以自定义限制、报文和 I/O 配置,以完全符合应用程序的特定要求和操作参数。
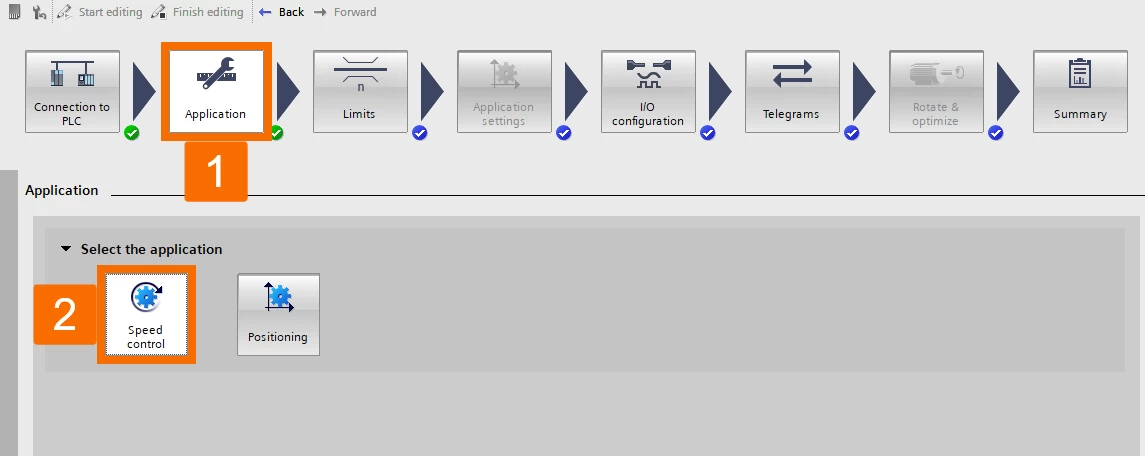
图 2.8:西门子伺服驱动器速度控制 - 选择速度控制应用
如果您希望将离线配置下载到伺服驱动器上,请单击“摘要”选项卡下的“执行下载”按钮。

图 2.9:西门子伺服驱动器速度控制 - 将离线配置下载到驱动器
通过双击项目树中的“设备和网络”,将出现其窗口。之后,转换到“网络视图”并继续配置 PLC 和 S200 PN 驱动器之间的连接。

图 2.10:西门子伺服驱动器速度控制 - 配置 PLC 和驱动器之间的网络连接
伺服驱动器速度控制:PLC 逻辑
本节的主要重点是提供有关 PLC 逻辑编程的全面指南,确保用户能够有效地执行任务。
找到主 OB1(组织块)并将其打开以获取访问权限。进入后,您可以从“指令”任务卡中“可选包”项下的 SINAMICS 文件夹中选择并移动 SinaSpeed 功能块,并将其放置到 OB1 的指定区域中。出现“调用选项”窗口后,左键单击“确定”按钮,以确保背景数据块自动合并到项目中。
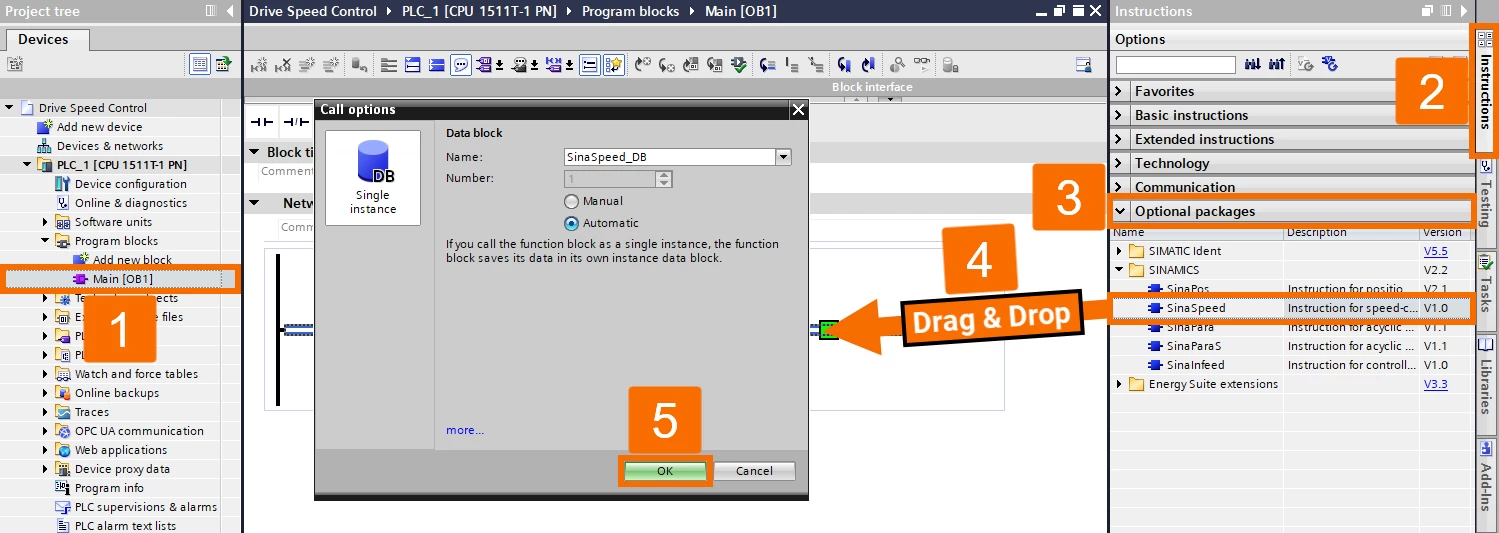
图 3.1:西门子伺服驱动器速度控制 - 构建 PLC 逻辑
双击项目树中 PLC“程序块”文件夹下的“添加新块”,选择“数据块”选项卡,为其指定所需的名称,选择全局作为数据块类型,然后按“确定” ' 按钮。

图 3.2:西门子伺服驱动器速度控制 - 创建所需的全局数据块
在已创建的全局数据块中建立变量。接下来,对 PLC 逻辑进行必要的修改以满足所需的要求。工程编译完成后,进行传输下载到PLC的CPU中进行运行部署。

图 3.3:西门子伺服驱动器速度控制 - 建立全局数据块变量并最终确定 PLC 逻辑
伺服驱动器速度控制:执行
在本节中,您将了解操作 PLC 逻辑所涉及的过程。
通过按眼镜图标,您可以访问专用监控界面,该界面提供有关 OB1 的实时信息和见解。通过将速度设定值调整到所需值并启用轴,驱动器将被激活,启动电机的旋转。
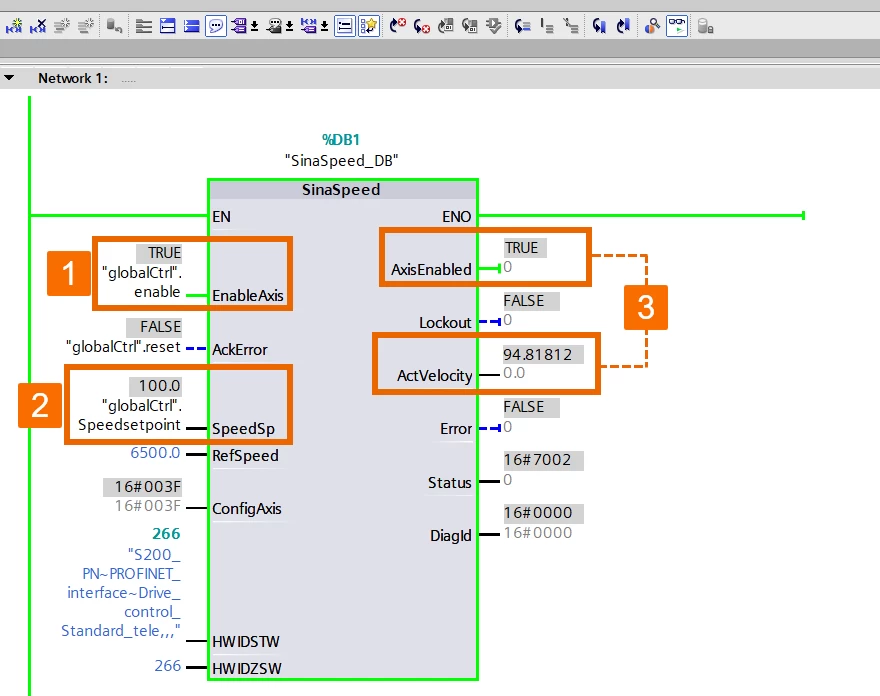
图 4.1:西门子伺服驱动器速度控制 - 调整速度设定值并启用轴
通过将速度设定值调整为负值,您可以更改电机的旋转方向,从而改变其旋转行为。

图 4.2:西门子伺服驱动器速度控制 - 改变电机旋转方向
通过停用轴,您将停止电机的旋转,导致“AxisEnabled”的状态切换为 FALSE,反映其停用状态。
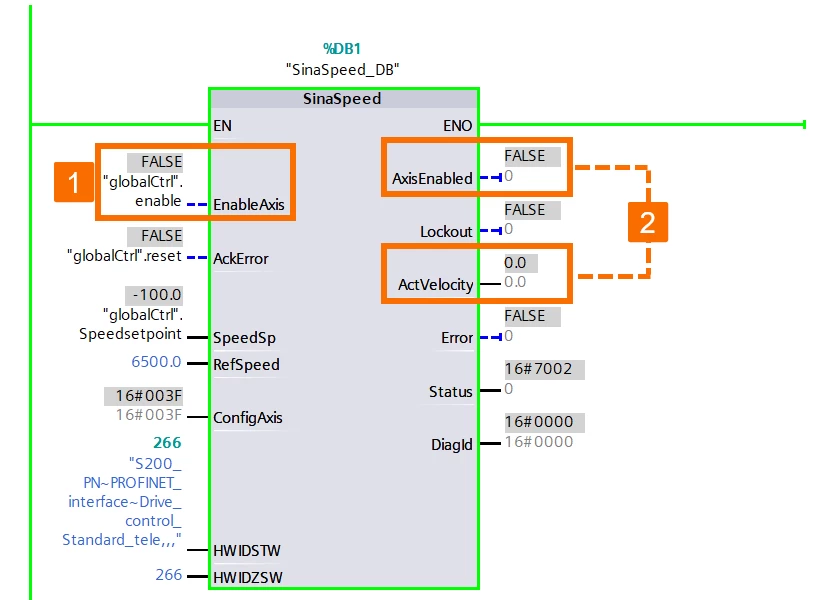
图 4.3:西门子伺服驱动器速度控制 - 停止电机旋转
伺服驱动器位置控制:硬件设置
创建项目并将所需的 PLC、伺服驱动器和电机合并到 TIA Portal 中的方法与您之前在伺服驱动器速度控制部分中学到的方法类似。
双击“引导式快速启动”功能启动快速启动向导。此操作允许您访问用户友好的界面,指导您完成必要的步骤。这些步骤之一涉及将运动控制功能从伺服驱动器分配给指定的 PLC。此外,您可以定制报文、I/O 配置和限制,以符合您应用的特定要求。
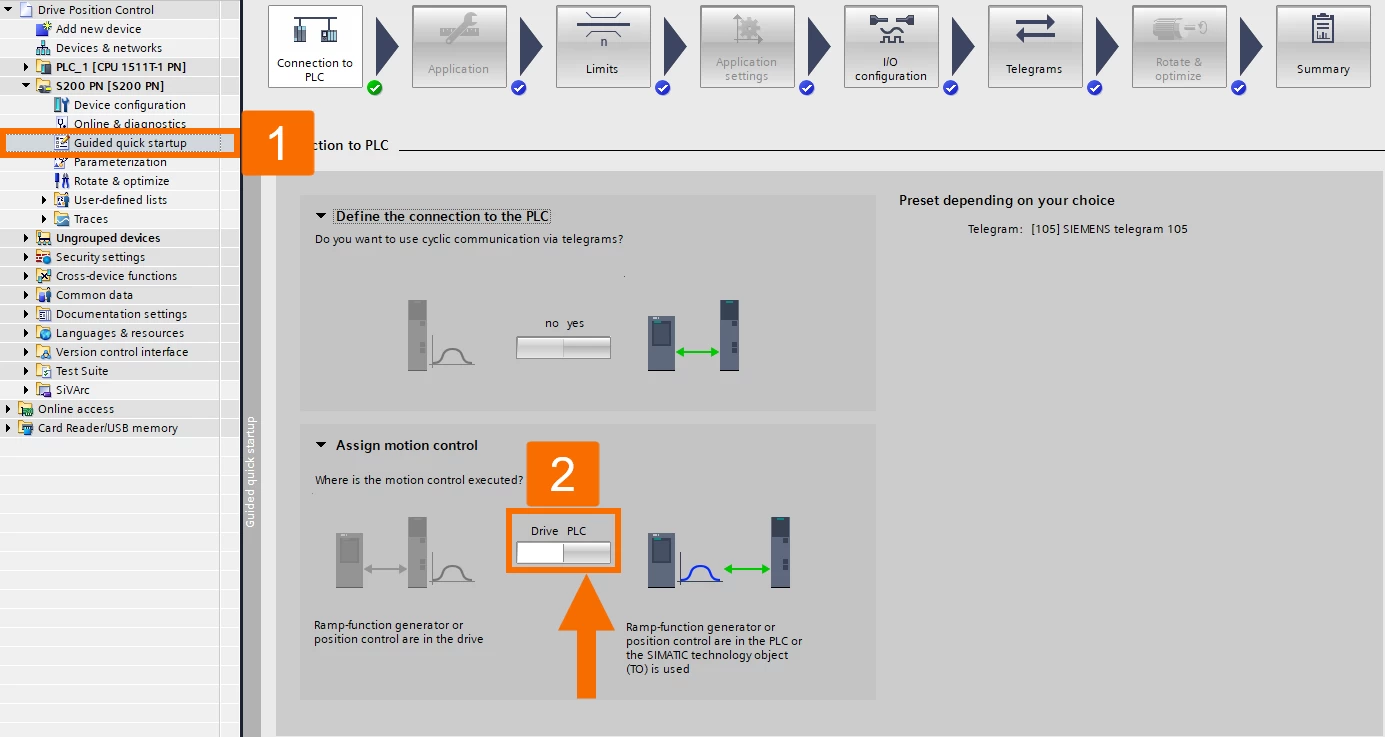
图 5.1:西门子伺服驱动器位置控制 - 将运动控制分配给 PLC
要将离线配置下载到伺服驱动器上,左键单击“摘要”选项卡下的“执行下载”按钮至关重要。此步骤对于成功完成该过程至关重要。

图 5.2:西门子伺服驱动器位置控制 - 将离线配置下载到驱动器
在左侧窗格中找到“设备和网络”项目,然后双击将其打开。打开后,切换到“网络视图”并继续配置 S200 伺服驱动器和 PLC 之间的连接,建立牢固可靠的连接。

图 5.3:西门子伺服驱动器位置控制 - 配置 PLC 和驱动器之间的网络连接
切换到“拓扑视图”,开始 S200 伺服驱动器和 PLC 之间拓扑连接的配置过程,从而实现两个组件之间的高效网络通信。

图 5.4:西门子伺服驱动器位置控制 - 配置 PLC 和驱动器之间的拓扑连接
移至“网络视图”并找到与 PLC 关联的 Profinet 接口。继续在检查器窗口中选择“属性”,然后选择“常规”选项卡中“高级选项”下的“实时设置”。在设置中,将“同步角色”配置为“同步主机”,并确保“发送时钟”设置为 1 毫秒。
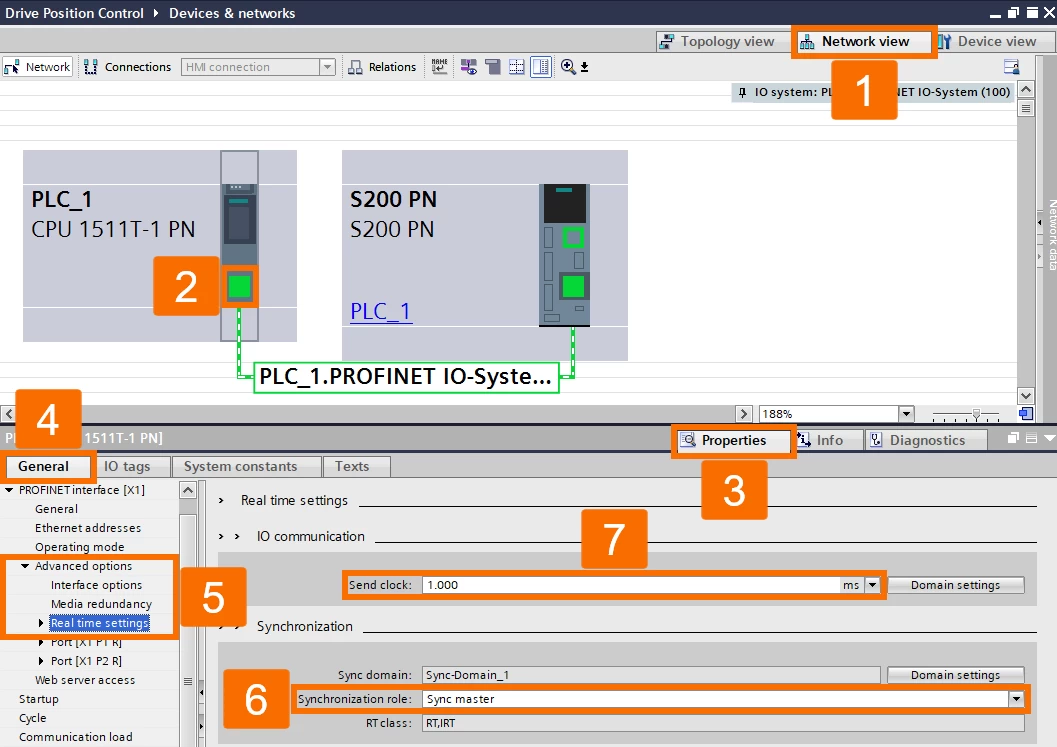
图 5.5:西门子伺服驱动器位置控制 - 配置同步和 IO 通信
伺服驱动器位置控制:PLC 逻辑
本教程部分的主要目的是让您熟悉 PLC 中逻辑编程的过程。
在项目树中“PLC_1”内的“技术对象”文件夹下找到“添加新对象”,然后双击将其打开。打开后,导航至“运动控制”类别并选择“TO_PositioningAxis”。继续修改该工艺对象的名称,然后单击“确定”完成该过程。

图 6.1:西门子伺服驱动器位置控制 - 创建定位工艺对象
打开“PositioningAxis”窗口后,设置基本参数以符合正在处理的应用程序的特定要求。
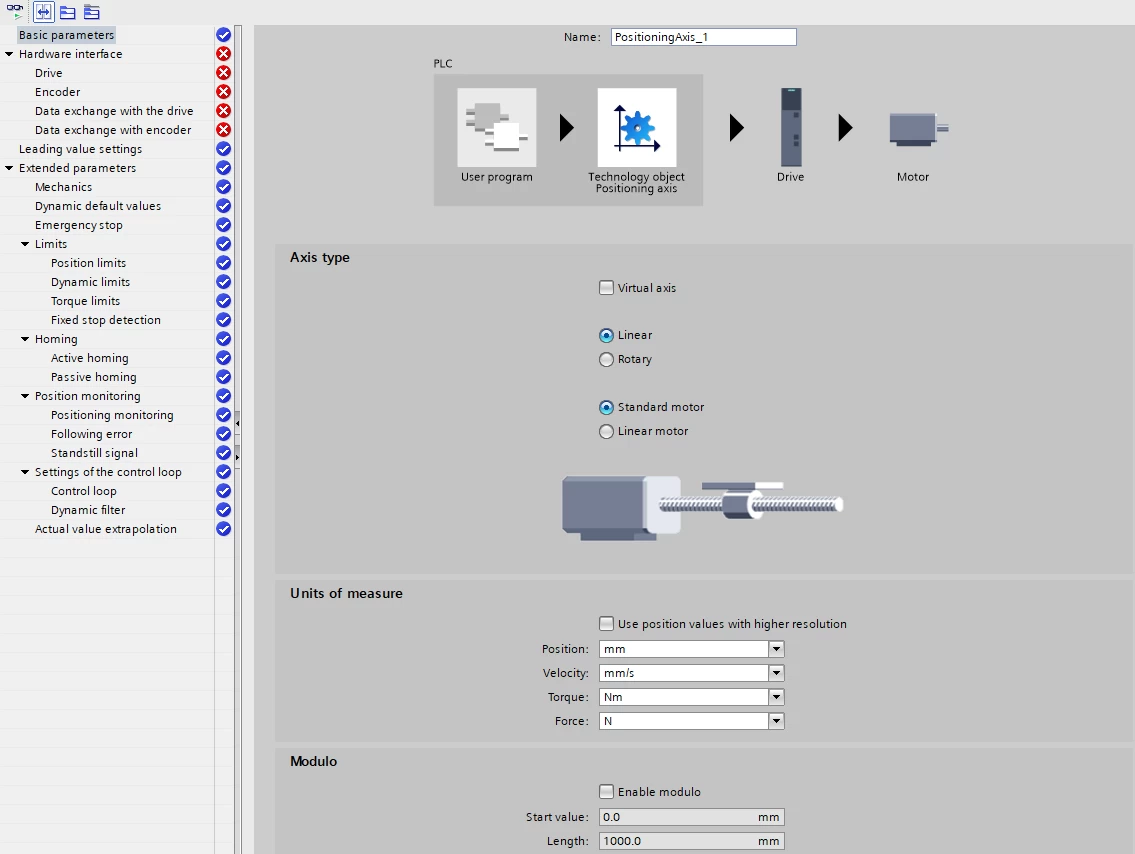
图 6.2:西门子伺服驱动器位置控制 - 配置基本参数
找到并单击“驱动器”项目,然后单击省略号 (...) 按钮以显示其他选项。在“Profinet IO-System”文件夹下的可用选项中,选择您所需的驱动器。完成后,选择目标设备并通过单击绿色复选标记确认选择。
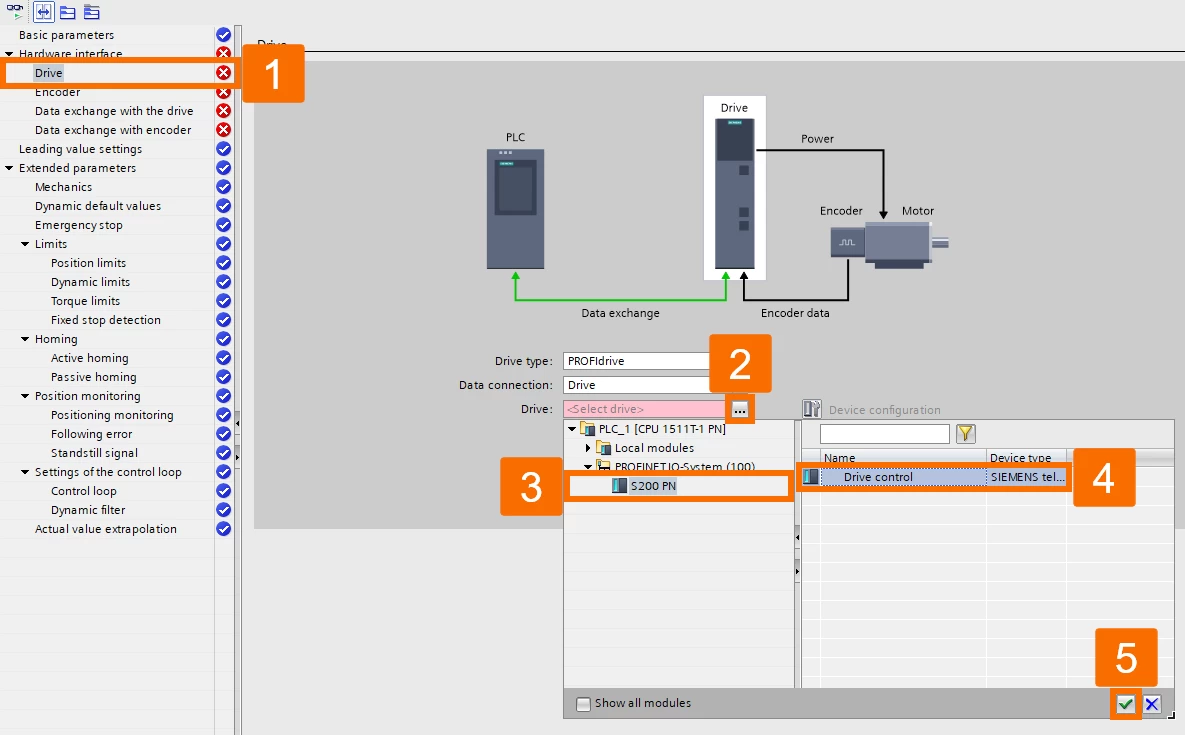
图 6.3:西门子伺服驱动器位置控制 - 选择所需的驱动器以应用工艺对象
在“扩展参数”部分中,微调扩展参数以最适合当前应用场景的要求。
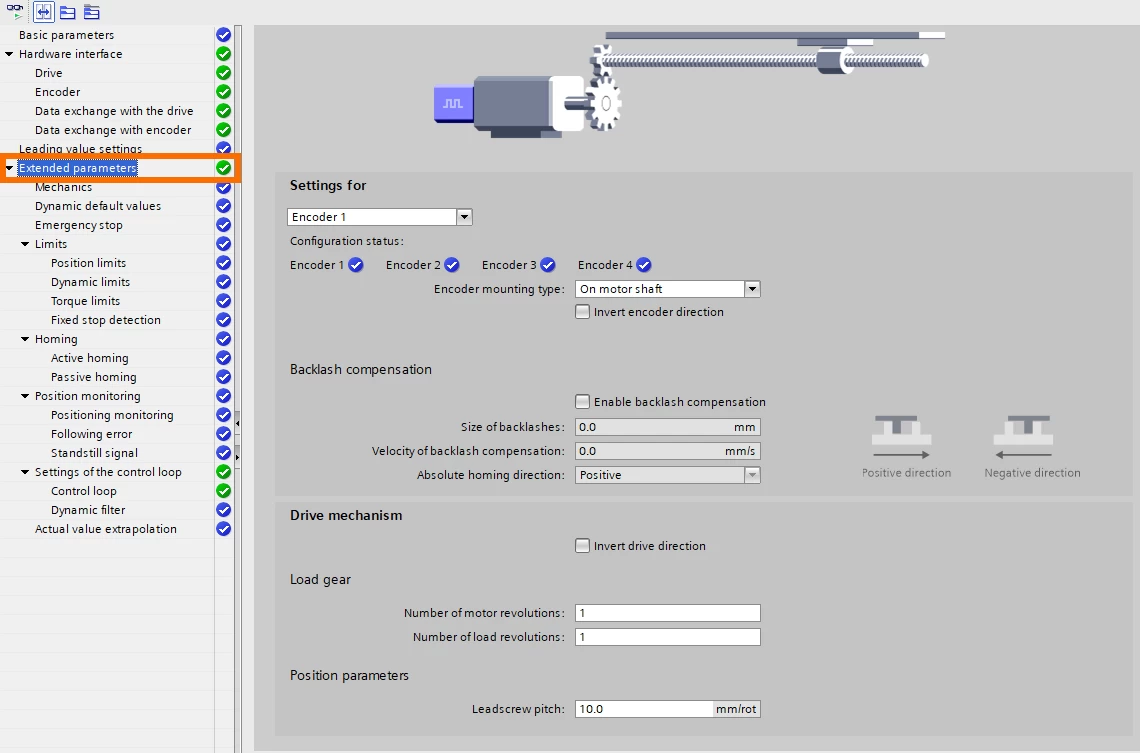
图 6.4:西门子伺服驱动器位置控制 - 配置扩展参数
在“PLC_1”内的“程序块”文件夹下找到“Main [OB1]”,然后双击将其打开。根据图 6.5 对 PLC 逻辑进行修改以纳入必要的更改。为此,您可以使用“指令”窗格上“技术”选项内“运动控制”文件夹下的编程块。启动项目编译,然后通过下载将其传输到 PLC。

图 6.5:西门子伺服驱动器位置控制 - 最终确定 PLC 逻辑
伺服驱动器位置控制:执行
生成全面的“监视和强制表”,允许对创建的监视表和组织块进行并发监视,从而促进同时观察和操作数据和程序执行。
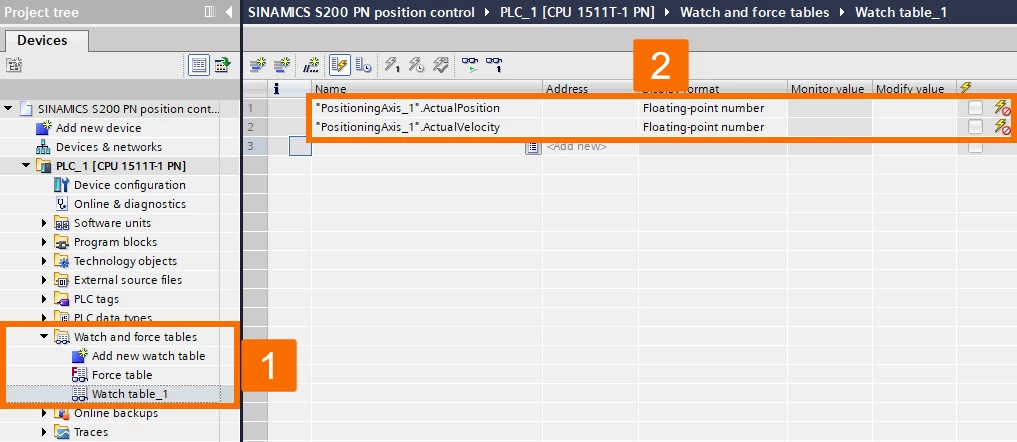
图 7.1:西门子伺服驱动器位置控制 - 创建所需的监视和力表
通过利用 MC_POWER 中的“启用”命令,您可以激活该轴,这随后会导致 MC_POWER 的“状态”设置为 True。
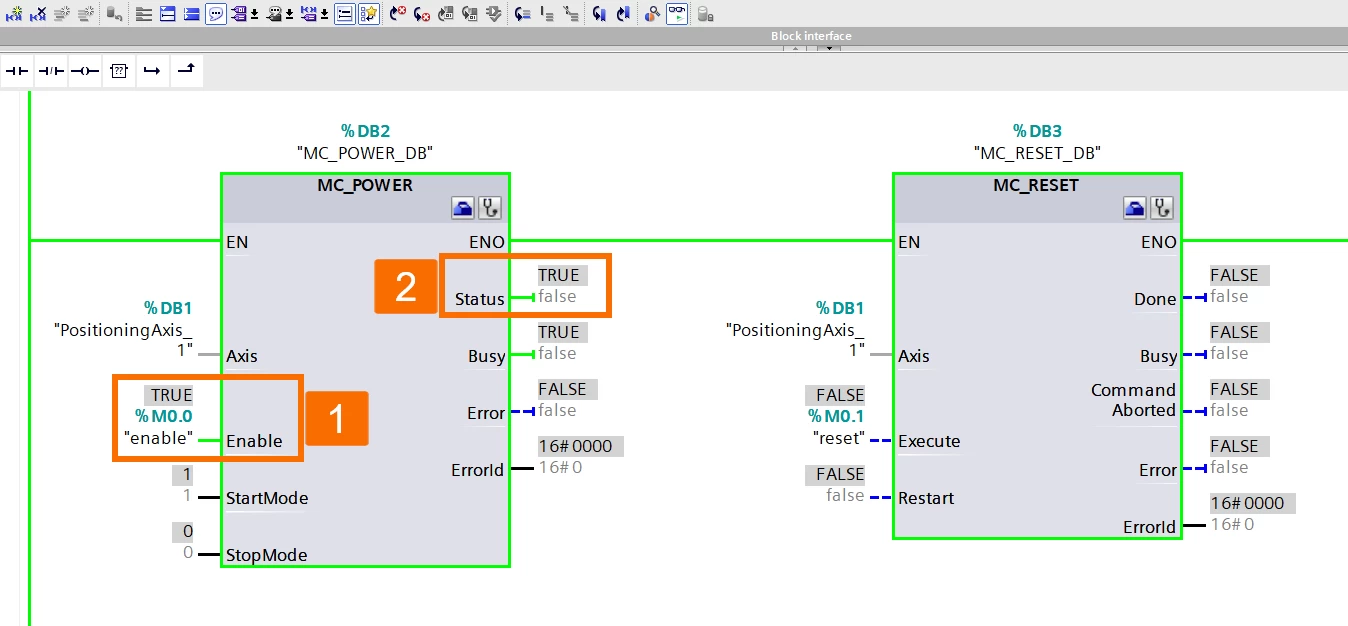
图 7.2:西门子伺服驱动器位置控制 - 使能 MC_Power 状态
启用驱动器后,在此应用程序中获得的位置读数为 6.14,但值得注意的是,该值在其他应用程序中可能会有所不同。
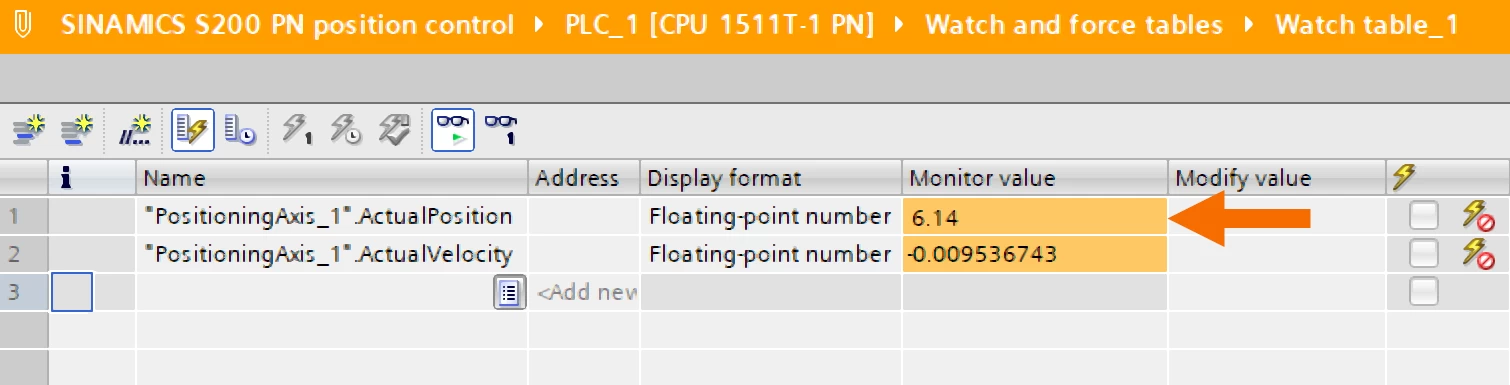
图 7.3:西门子伺服驱动器位置控制 - 测量驱动器的实际位置
启动执行相对定位,定位完成后测得实际位置为106.14。
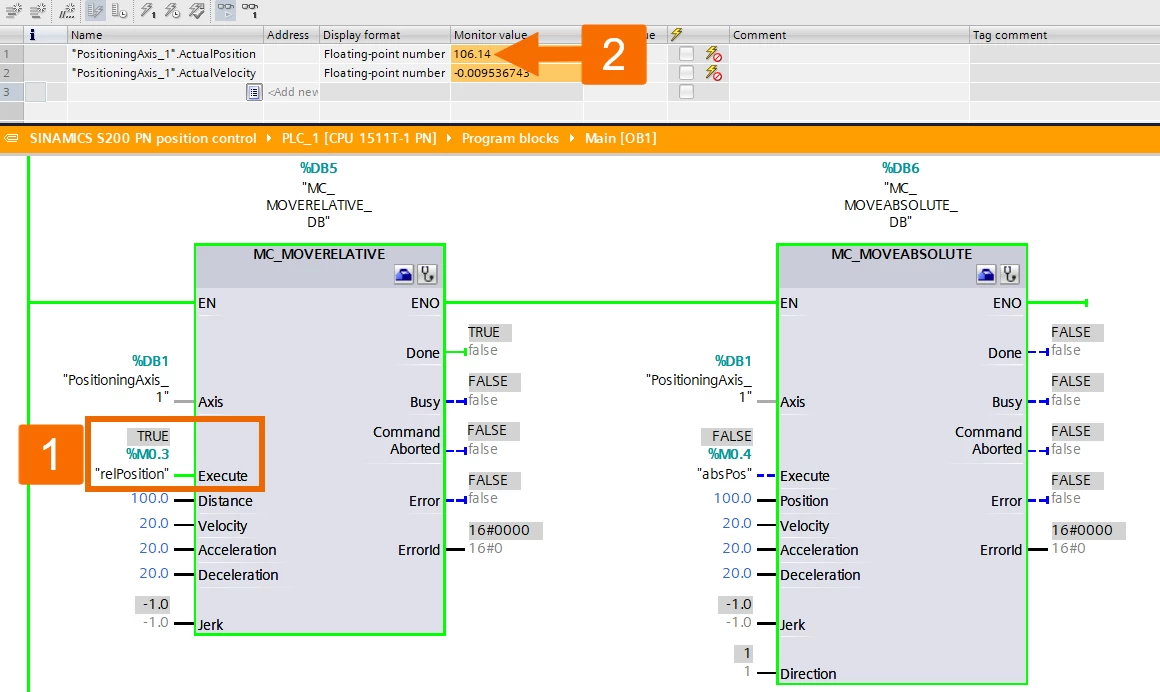
图 7.4:西门子伺服驱动器位置控制 - 启用相对定位并测量驱动器的实际位置
启动执行回零过程,一旦回零过程结束,当前位置测量为0.0。
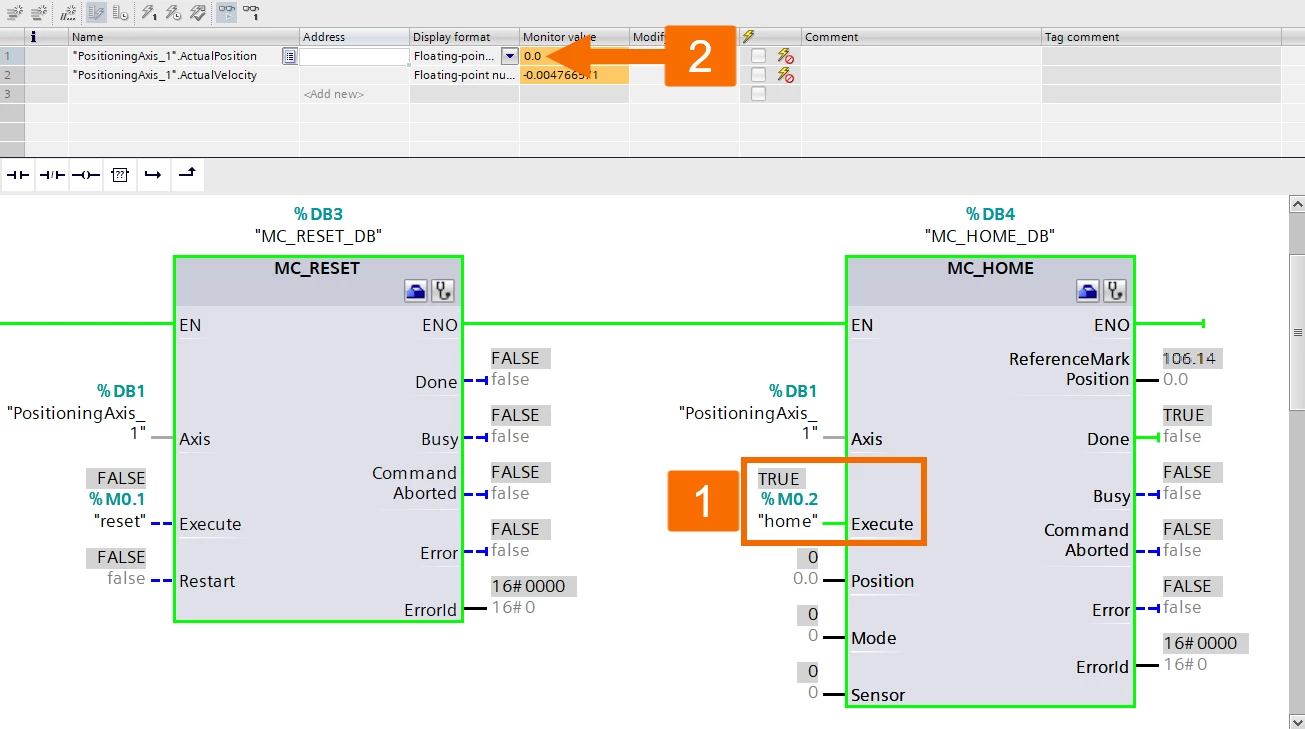
图 7.5:西门子伺服驱动器位置控制 - 启用归位过程并测量驱动器的实际位置
启动执行绝对定位,定位任务完成后,测量得到的实际位置为100.0。仅当轴已达到回零状态时才能执行绝对定位。

图 7.6:西门子伺服驱动器位置控制 - 启用绝对定位并测量驱动器的实际位置
结论
总之,您学习了如何使用SIMATIC S7-1500 PLC 硬件和TIA Portal 软件控制Siemens S200 PN 伺服驱动系统的速度和位置。这些功能使自动化工程师具备精确位置和速度控制的基本能力,使他们能够实现卓越的运动控制并提升工业自动化操作。