KUKA机器人备份与还原
下面介绍2种KUKA机器人备份与还原的方法,以便大家在维修和保养中使用。
方法一:利用软件Work Visual备份与还原
1.先将电脑与机器人控制器进行连接(IP设置)(电脑中的IP要与机器人中的IP相匹配),这里不多说PLC,具体看硬件配置。插入PLC通讯端口,如图所示。

2.打开机器人调试软件
3.点击文件,选择查找项目
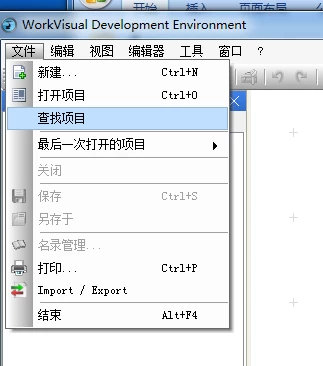
4.点击查找
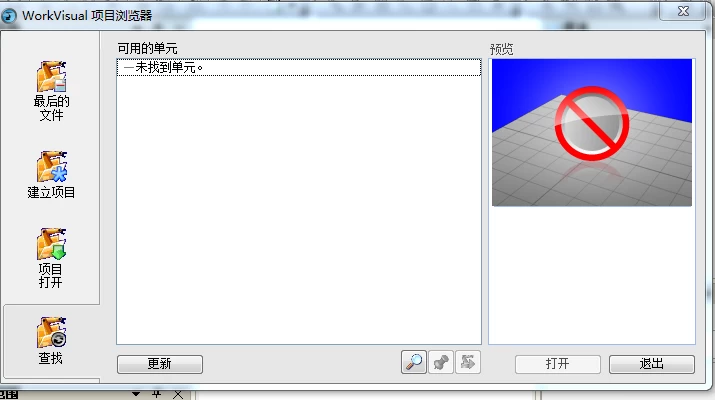
5.点击更新
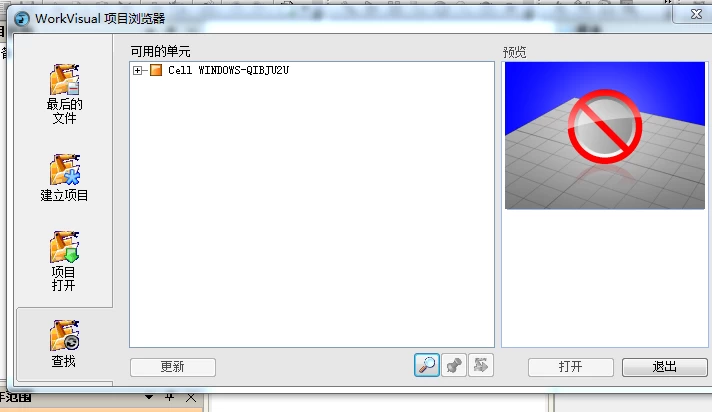
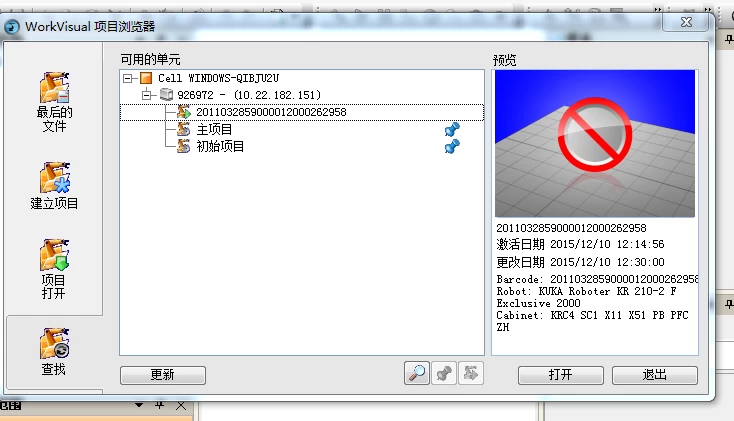
6.此时就可以看到查找到的项目
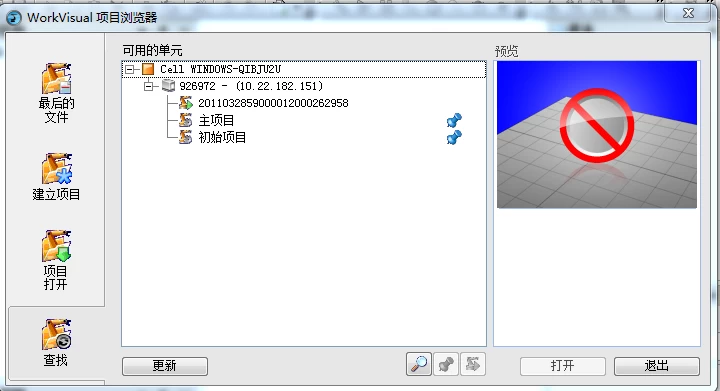
7.选择项目,点击打开按钮
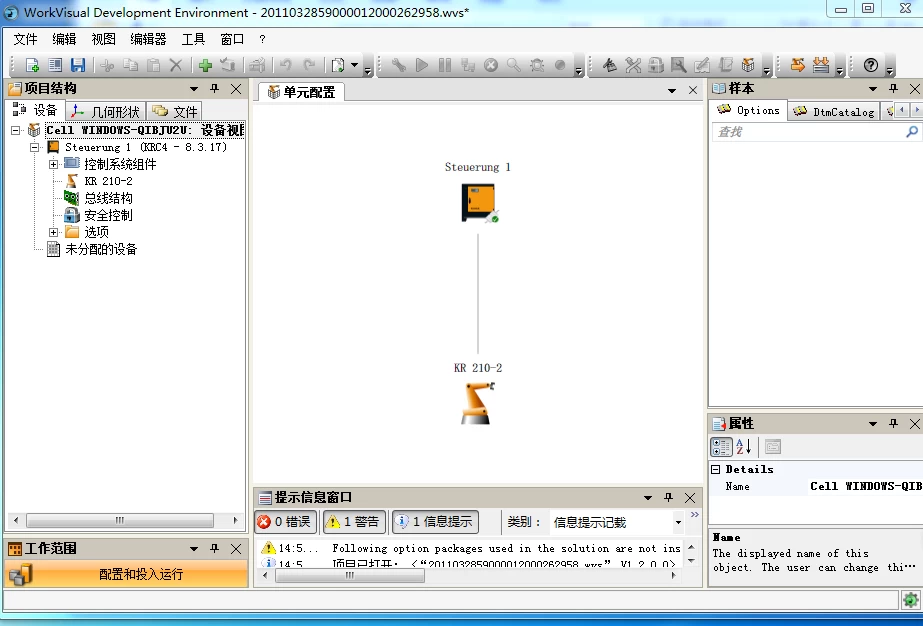
8.打开项目后的画面
9.点击文件,选择另存于,可以将机器人控制器中的程序进行备份
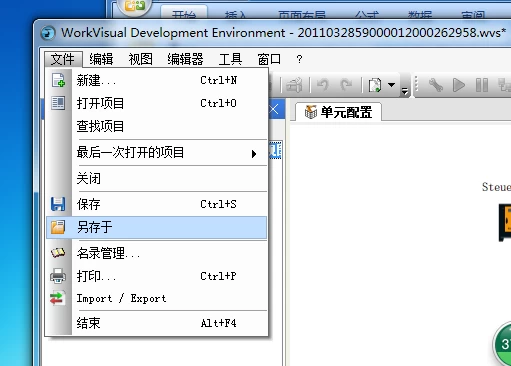
10.将文件另存为目标文件中,这样机器人软硬件的备份就OK啦!文件名与机器人程序名一样的压缩文件。
11.接下来就是数据还原的导入与导出。
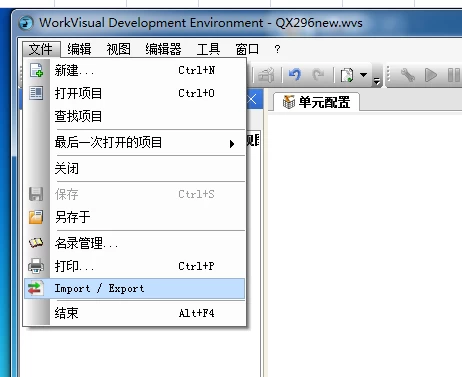
12.首先打开电脑中的机器人项目
点击“文件”,选择“Import/Export(导入导出)
13.选择”输出部分项目“,点击“继续”。
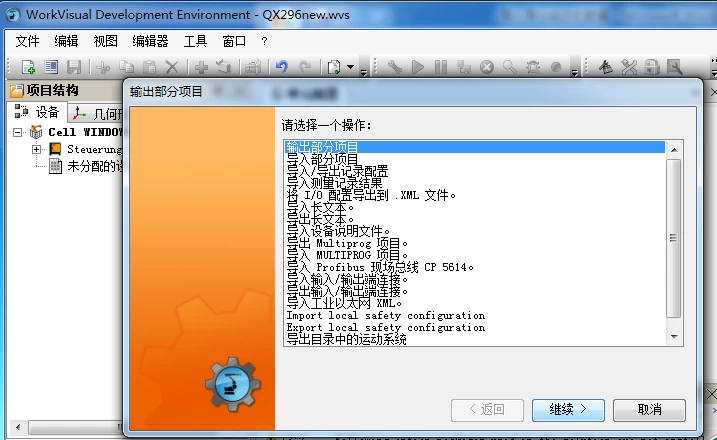
14.继续“点击”继续“。
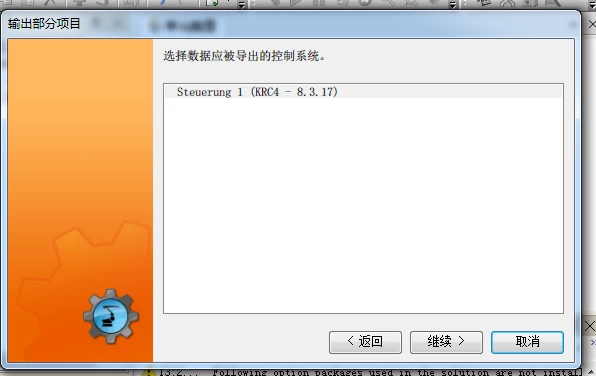
15.此时界面中显示要导出的元素,点击”继续“。

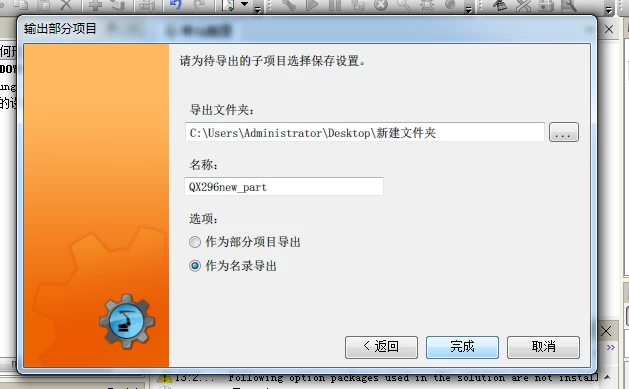
16.选择存储路径后,点击”完成“。
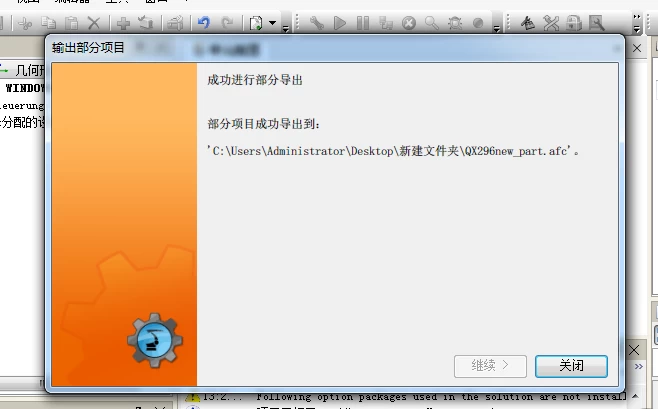
17.界面显示“成功进行部分导出”,点击关闭,导出结束。
18.导入部分项目数据
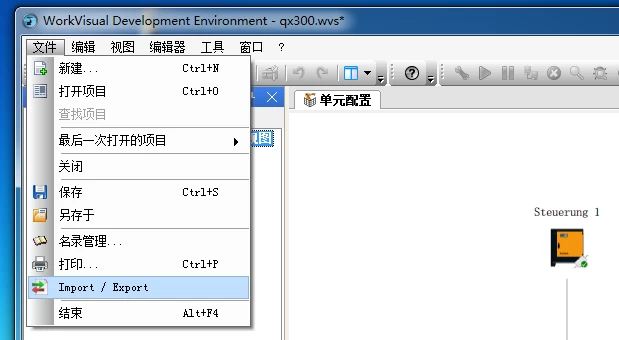
19.打开软件,点击“文件”,选择“导入、导出。
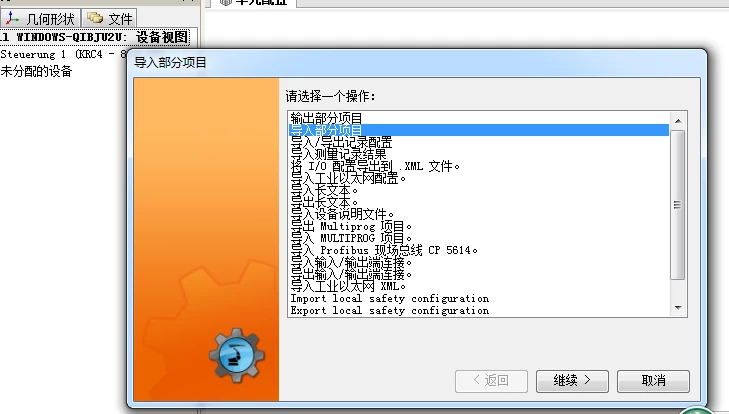
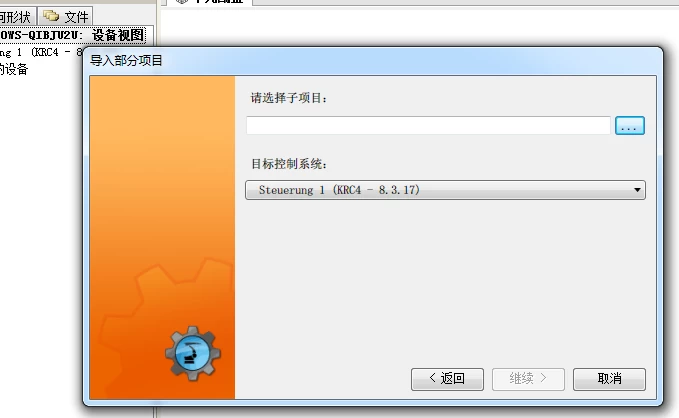
20.进入界面后,选择”导入部分项目“。
21.点击”浏览”按钮
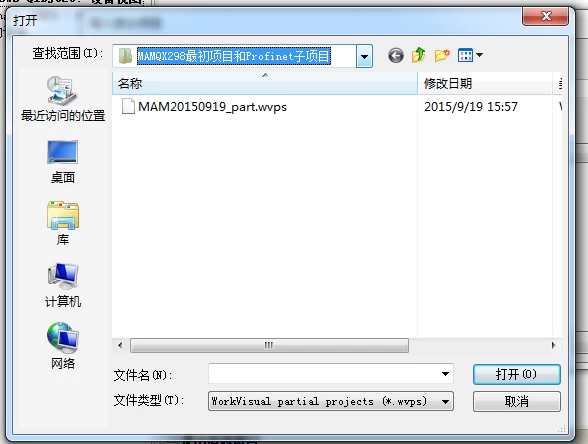
22.选择要导入项目的文件夹,点击“打开”按钮。
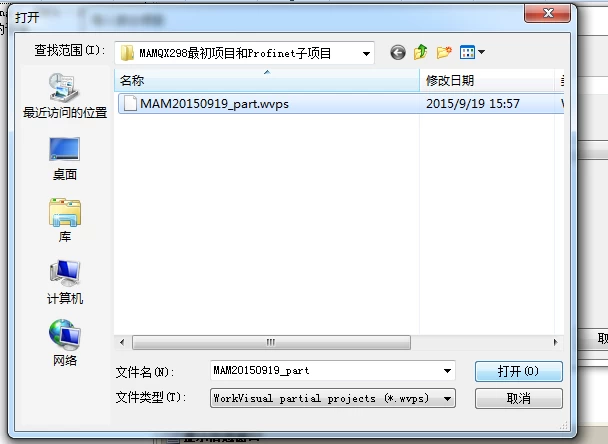
23.此时界面中显示出要导入文件的名字,继续点击“打开”按钮。
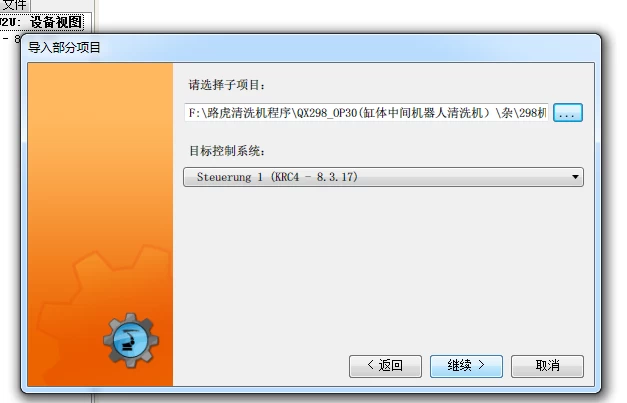
24.继续点击“继续”按钮。
25.把需要导入的文件勾选上,点击“完成”。
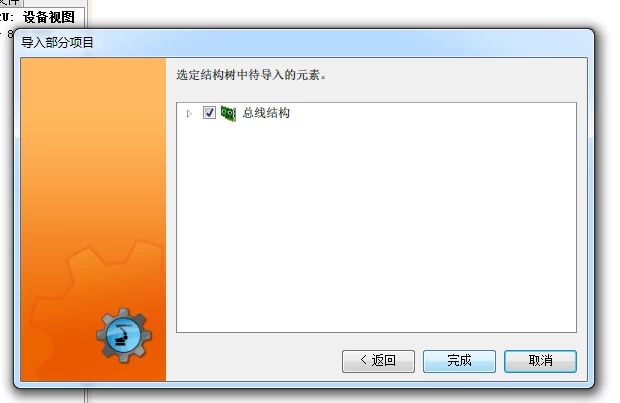
一般这里导入的是“总线结构”
所有界面中出现了输入、输出的开始地址配置,直接输入要配置的起始地址就可以了。
方法二:利用U盘备份与还原
这种方法最为简单方便,也是我们经常使用的备份方法。
1.首先将准备好U盘插入控制柜或手持器中,注意U盘无毒且空间足够,但不宜过大。大概2-8G适宜。
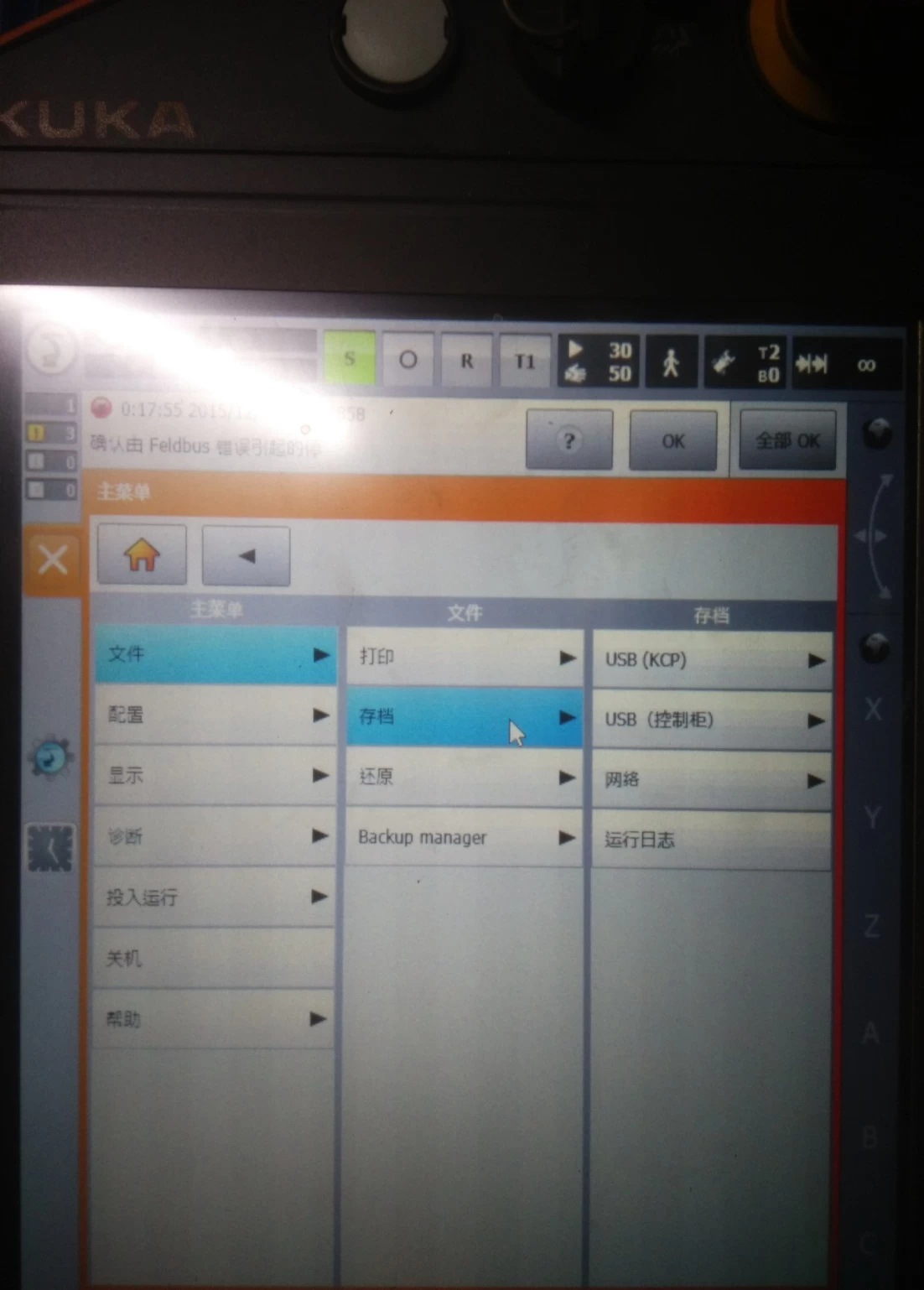
2.T1模式,选择文件—存档
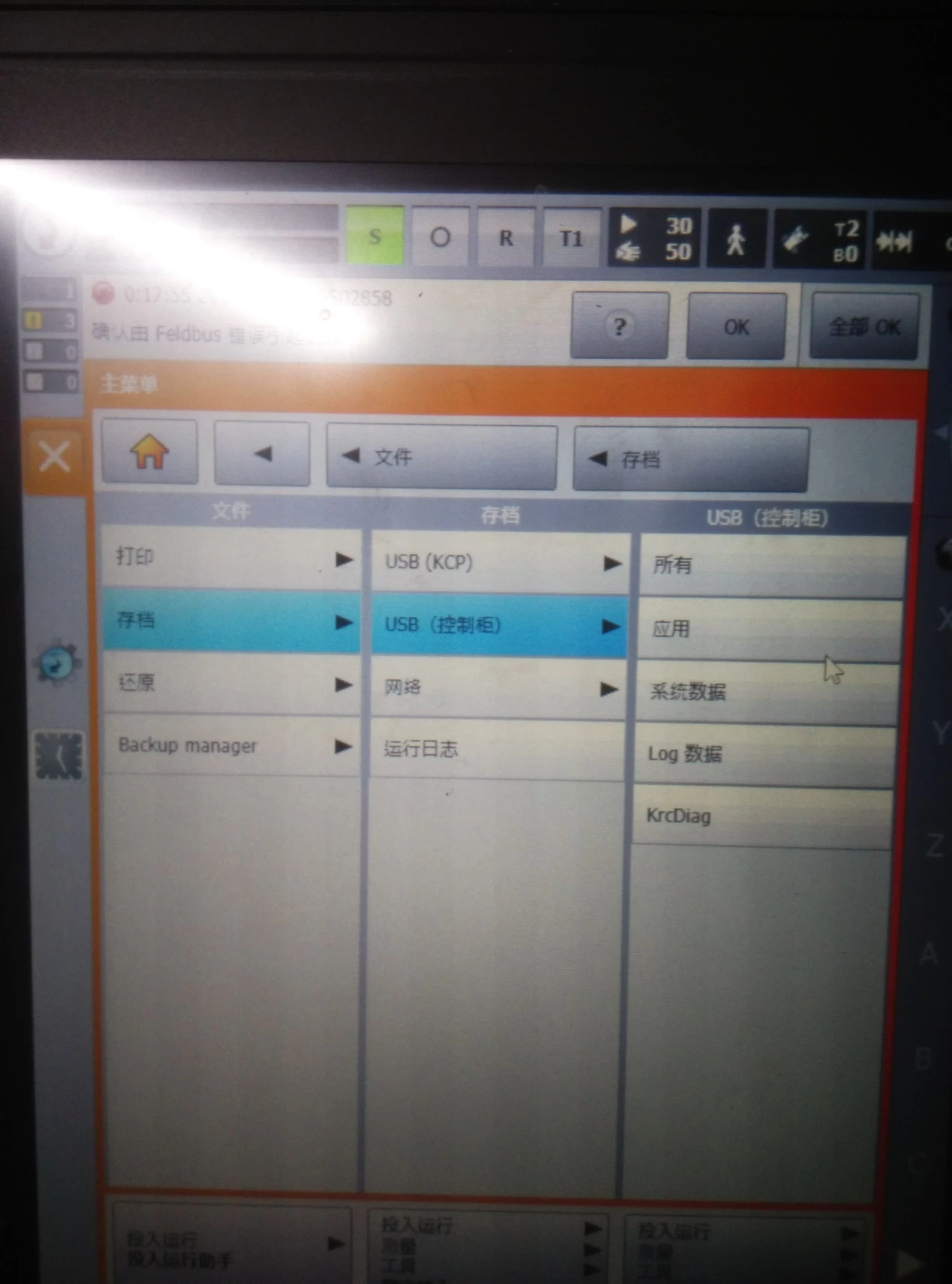
3.选择USB控制柜或面板,看你USB插在哪里决定。
4.选择所有,并确定存档。
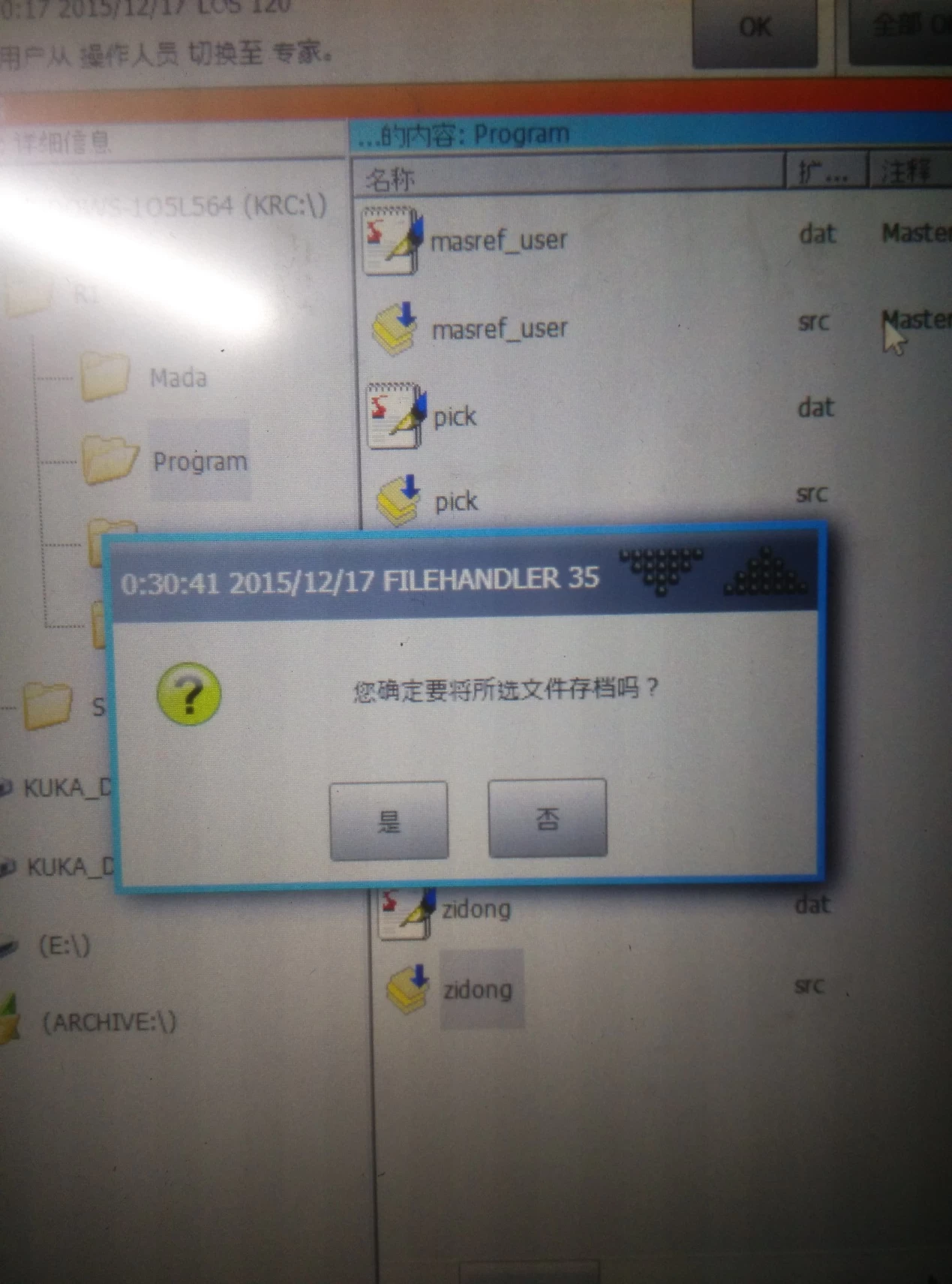
5.选择“是”,等待存档提示完成。
2种机器人备份和还原方法的数据保存就OK啦。